使用ATMega8微控制器的線路機器人電路

你有沒有做過自己的機器人?這里有一個非常簡單和容易的機器人。在這個項目中,我將解釋如何使用單片機設計和建造一個跟線機器人。跟線機器人是一個基本的機器人,它沿著一條有特定寬度的線(通常是淺色表面上的一條黑線)指示的特定路徑前進。
本文引用地址:http://www.104case.com/article/202306/447416.htm
跟線機器人的電路原理
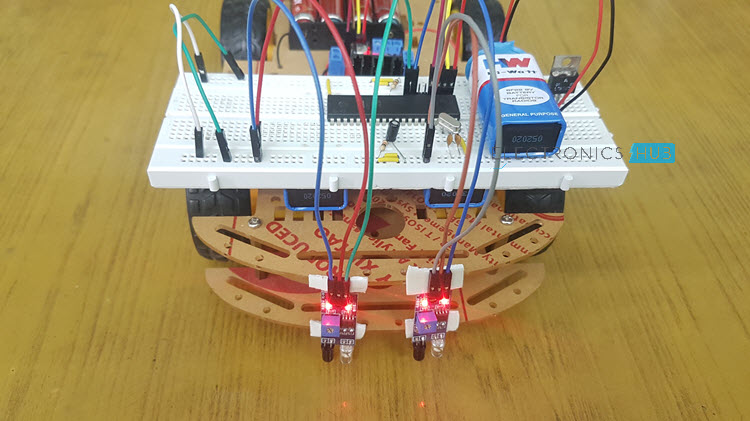
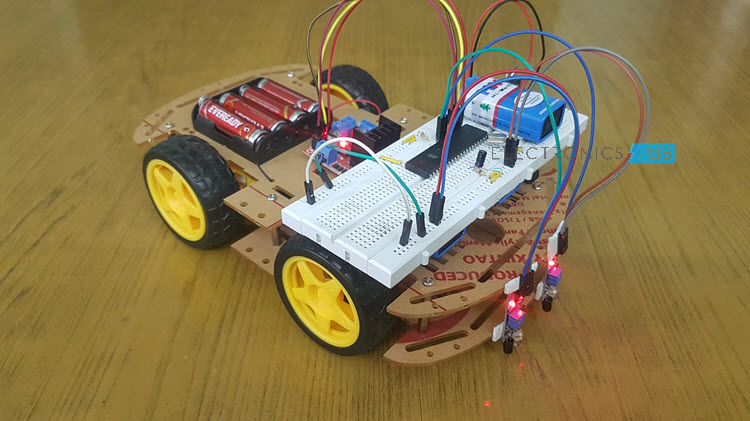
該電路主要由8051單片機、兩個紅外傳感器、電機和電機驅動IC(嵌入在一個模塊中)組成。線路跟隨者機器人需要機械地安排底盤。我使用了一個四輪驅動的丙烯酸底盤。兩個紅外傳感器被安裝在機器人的前部,二極管朝向地球。
當機器人被放置在固定的路徑上時,它通過檢測線來跟蹤路徑。機器人的運動方向取決于兩個傳感器的輸出。當兩個傳感器在路徑線上時,機器人向前移動。如果左邊的傳感器遠離直線,機器人就向右移動。同樣地,如果右邊的傳感器遠離路徑,機器人就會朝左邊移動。每當機器人遠離其路徑時,就會被紅外傳感器檢測到。
你知道遙控間諜機器人電路是如何工作的嗎?
紅外傳感器由板上的紅外發射器和紅外接收器組成。當車輛在黑線上移動時,紅外射線不斷被黑色表面吸收,沒有反射的射線,使輸出很高。每當機器人移動到白色表面時,它就開始反射紅外射線,使輸出變低。因此,根據紅外傳感器的輸出,微控制器指示電機改變其方向。
線性跟蹤機器人電路圖

電路中的元件
8051微控制器
8051微控制器的開發板(優先)。
10KΩ 電阻器 X 2
10μF電容
11.0592MHz晶體
33pF 電容 X 2
按鈕
電機驅動模塊(L298N)
帶電機的機器人底盤
紅外傳感器 x 2
如何設計一個跟線機器人?
該電路由8051微控制器、紅外傳感器(帶紅外發射器和紅外接收器)、L298N電機驅動模塊、帶4個輪子和4個電機的機器人底盤、電池座組成。
8051微控制器是項目的主要組成部分。它是一個8位的微控制器,有32個可編程的I/O引腳。它有許多外圍功能,如可編程的UART,兩個8位定時器/計數器,兩個中斷,外部存儲器訪問等。
機器人的直流電動機通過一個電機驅動IC與控制器連接。由于控制器的輸出最大為5V,電流非常小,它不能驅動電機。因此,為了放大這一電壓,使用了電機驅動IC。L298N可以驅動高達36伏的電機,并且可以提供3A的驅動電流。
驅動器IC有15個引腳,通常采用多瓦15封裝。這些IC在市場上很容易買到,作為模塊。電機驅動模塊的輸入連接到PORT2的P2.0、P2.1、P2.2和P2.3引腳。
兩個紅外傳感器連接到微控制器的P2.6和P2.7引腳。安排好底盤,將機器人車的四個輪子連接到電機上,而電機又連接到微控制器上。
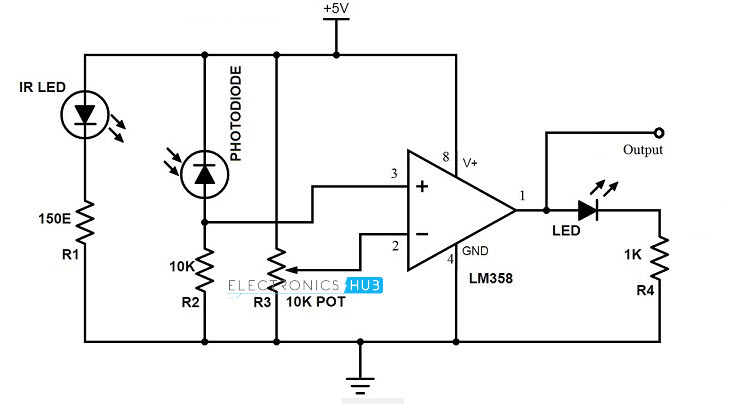
紅外傳感器的設計
紅外傳感器電路主要由紅外發射器和紅外接收器組成。紅外發射器類似于一個LED。它的工作電壓約為1.4V。因此,為了保護它,一個150Ω的電阻與它串聯,并連接在正向偏壓上。紅外接收器被連接在反向偏壓中,一個10KΩ的電阻被放在VCC和接收器之間。輸出是在電阻和紅外接收器之間進行的。
由于這是一個模擬輸出,我們可以用一個簡單的比較器集成電路(如LM358)將其轉換為數字高電平和低電平。本項目中使用的紅外傳感器模塊使用相同的配置,其電路圖如下所示。
紅外傳感器的工作原理
紅外發射器連續發射紅外射線。當紅外發射器在黑色表面時,這些射線被表面吸收,當它在白色表面時,這些射線被反射。當沒有收到紅外射線時,紅外接收器有最大的電阻,來自VCC的電壓流經電阻。在輸出引腳,電壓約為5V。
隨著接收器接收到的紅外射線的強度增加,電阻值下降,發生反向斷路。因此,通過電阻的電壓是接地的。因此,在輸出引腳,它將產生0V的電壓。
線路跟蹤機器人車輛電路工作
首先用黑色膠帶在淺色的表面上畫出路徑。
將機器人放在地板上。
現在給電路通電。
機器人在指定的路徑上移動。
當它移出路徑時,傳感器檢查并自動調整機器人。
線路跟蹤機器人電路應用
這可以用在沒有司機的汽車系統中,并增加一些功能,如障礙物檢測。
這也可用于工業和國防應用。
線路跟蹤機器人的局限性
跟線機器人需要2-3英寸寬的線。
如果繪制的黑線強度低,它可能無法正常移動。
紅外傳感器有時也會吸收周圍環境的紅外射線。因此,機器人可能以不適當的方式移動。










評論