基于自適應(yīng)指數(shù)增益的滑模濾波器
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
摘要:為了提高傳統(tǒng)濾波器的性能,改善其在遠(yuǎn)距離跟蹤目標(biāo)時(shí)收斂速度慢的問題。本文提出一種自適應(yīng)指數(shù)增益滑模濾波器,此濾波器能夠在距離滑模面遠(yuǎn)處獲得大的增益,迫使系統(tǒng)狀態(tài)加速收斂,在距離滑模面近時(shí)獲得一個(gè)小增益,不損失濾波器的濾波效果。并將基于自適應(yīng)指數(shù)增益的滑模濾波器進(jìn)行仿真驗(yàn)證,證明了其在開環(huán)條件下具有更優(yōu)越的性能。
本文引用地址:http://www.104case.com/article/202207/436856.htm關(guān)鍵詞:滑模;自適應(yīng);指數(shù)增益
基金項(xiàng)目:本論文受吉林省自然科學(xué)基金(20210101471JC)和吉林省產(chǎn)業(yè)技術(shù)研究與開發(fā)專項(xiàng)(2019004-2)資助
1 引言
控制系統(tǒng)中常使用傳感器進(jìn)行信號(hào)采集,但由于環(huán)境等各種不確定因素,傳感器采集的信號(hào)容易被噪聲破壞干擾,被干擾后的傳感器信號(hào)會(huì)降低系統(tǒng)的性能甚至影響系統(tǒng)的穩(wěn)定性。因此,需要使用濾波器對(duì)被噪聲干擾的信號(hào)進(jìn)行濾波處理。很多學(xué)者為達(dá)到不同的目的,提出了各種不同的濾波器 [1-5],如卡爾曼濾波器、中值濾波器、滑模濾波器等,滑模濾波器作為一種物理實(shí)現(xiàn)簡(jiǎn)單的非線性濾波器,被國(guó)內(nèi)外學(xué)者廣泛研究。
Jin 等提出的一種結(jié)構(gòu)簡(jiǎn)單的滑模濾波器( TD-J ),此濾波器的主要優(yōu)點(diǎn)是并不需要對(duì)信號(hào)源進(jìn)行建模,且當(dāng)輸入恒定時(shí),可以實(shí)現(xiàn)輸出對(duì)輸入信號(hào)的有限時(shí)間收斂,并可以有效去除隨機(jī)噪聲。但其存在系統(tǒng)狀態(tài)遠(yuǎn)離跟蹤目標(biāo)時(shí)收斂速度過(guò)慢的缺點(diǎn)。針對(duì) TD-J 這一缺點(diǎn),本文提出一種基于自適應(yīng)指數(shù)增益的滑模濾波器,在距離滑模面遠(yuǎn)時(shí)此濾波器獲得大的增益,迫使系統(tǒng)狀態(tài)在遠(yuǎn)離滑模面時(shí)加速收斂。在距離滑模面近時(shí)獲得一個(gè)小增益,提高濾波器的濾波效果。
接下來(lái)在第二部分是 TD-J 的工作原理,第三部分是本文所提出的基于自適應(yīng)指數(shù)增益濾波器的工作原理,第四部分是 TD-J 和基于自適應(yīng)指數(shù)增益濾波器的仿真驗(yàn)證,第五部分是結(jié)論。
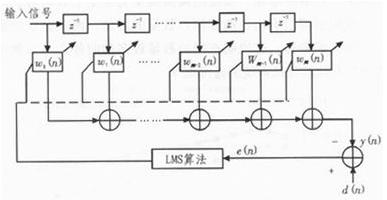
2 傳統(tǒng)濾波器的工作原理



![]()

3 基于自適應(yīng)指數(shù)增益的滑模濾波器
為了解決 TD-J 存在的問題,本文提出一種基于自適應(yīng)指數(shù)增益的滑模濾波器,其表達(dá)式如下:



4 仿真驗(yàn)證



5 結(jié)語(yǔ)
本文提出的基于自適應(yīng)指數(shù)增益的濾波器相對(duì)于 TD-J 響應(yīng)更快,達(dá)到了遠(yuǎn)距離加快收斂的目的。下一步工作如下:
(1)還需對(duì)提出的新濾波器用其他信號(hào)進(jìn)行效果驗(yàn)證,觀察新濾波器是否達(dá)到預(yù)期提高濾波器性能的目的;
(2)還需進(jìn)一步調(diào)整指數(shù)項(xiàng) β 的值,尋找最佳值;
(3)還需采用另一種無(wú)抖振的離散方式,消除抖振。
參考文獻(xiàn):
[1] 蔣明.數(shù)字濾波器的設(shè)計(jì)與算法實(shí)現(xiàn)[J].微電子學(xué)與計(jì)算機(jī).2020,2(1):16-19.
[2] GALLAGHER N. Wise G. A theoretical analysis of the properties of median filters[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1981, 29(6):1136-1141.
[3] JIN S, LV Z, XIONG X, YU J. A Chattering-Free sliding mode filter enhanced by frst order derivative feed forward[J]. IEEE Access, 2020, 8(1):41175-41185.
[4] UTKIN V I, POZNYAK A S. Adaptive sliding mode control with application to supertwist algorithm: Equivalent control method[J]. Auto Matica, 2013, 49(1):39--47.
[5] 宋波,陳江,于再興.調(diào)頻濾波器研制初探[J].軍事通信技術(shù) .2001.22(1):1-8.
[6] JIN S. KIKUUWE R, YAMAMOTO M. Parameter selection guidelines for a parabolic sliding mode filter based on frequency and time domain characteristics[J]. Journal of Control Science and Engineering,2012, 2012(Pt.2): 1-13.
[7] JIN S. KIKUUWE R, YAMAMOTO M. Real-time quadratic sliding mode filter for removing noise[J]. Advanced Robotics, 2012, 26(8-9):877-896.
(注:本文轉(zhuǎn)載自《電子產(chǎn)品世界》2022年7月期)



評(píng)論