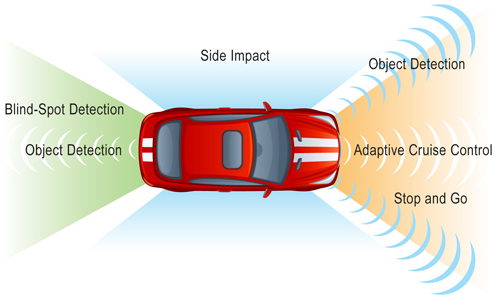
自動巡航車采用2D泛光LiDAR技術來消除盲點和確保安全

為了覆蓋足夠的范圍,許多 LiDAR 解決方案需要配置更強大、更昂貴的光學器材和激光源。通過專利技術用軟件方法對信號進行處理,LeddarTech 的泛光 LiDAR 技術具有成本優勢,能夠提供所需的范圍和性能,在巡航車應用的商業部署中(如緊急制動和盲區監控)
本文引用地址:http://www.104case.com/article/201904/399561.htm具有極大的吸引力。
最終結果
為確保覆蓋到所有盲點區域,可以使用 Leddar 傳感器模塊實施兩種主要架構類型。如果巡航車生產商需要其他級別的分辨率、量程或覆蓋范圍,則可根據具體應用場景選擇相應的模塊或架構。因此,如果設計團隊可以接受一些盲區,則需要的傳感器數量會減少。
1. 第一種結構提供了短程安全車殼,可以覆蓋巡航車的各個側面并消除盲點區域。
為實現這一目標,我們采用了八個 Leddar M16-LSR LiDAR 模塊,它們具有 100 度水平視場和 12 米行人(低反射率)量程,這八個模塊直接安裝在巡航車的車身中,距離地面的高度從 20 厘米到 75 厘米不等,可以檢測到近處的小物體。

圖 第一種傳感器架構所提供的短程安全車殼視圖。
2. 第二種架構類型在巡航車的側面和后面采用短量程覆蓋,而在車身前面則擴大覆蓋范圍,可用于冗余防撞系統。為實現這一目標,我們將五個具有 100 度 FOV 的模塊放置在巡航車的側面和后面,將兩個具有更大覆蓋范圍和更高分辨率的 M16-LSR LiDAR 傳感器(48 度 FOV,30 米行人范圍)放置在車身前面。

圖 第二種傳感器架構所提供的短程車殼視圖,車身前面覆蓋范圍更長。
使用 LeddarTech 的固態 LiDAR 技術實現巡航車安全車殼
下面簡要介紹了 LeddarTech 的 2D 泛光 LiDAR 解決方案,自動巡航車開發人員在安全車殼和緊急制動中采用了該解決方案。
Leddar M16-LED和 M16-LSR 模塊
模塊根據照明方式不同有兩種主要的配置類型:經典 LED 系列和新型激光系列。這兩種 M16 系列都非常適合戶外操作:它們采用固態設計,無需安裝電動機械、工作溫度范圍寬、適應各種氣候、不受照明條件影響。

是經過驗證的 Leddar 主力產品,因其多功能性和可靠性而倍受客戶青睞。該模塊的紅外 LED 光源最大可提供 100 米范圍的寬光束照明,并具有六種不同的視場配置。M16-LSR 使用激光源實現更長的量程,并提供更窄和具有更優定義的垂直 FOV,相比 M16-LED,的外形更小。
主要功能和優點包括:
? 出色的角度分辨率,使用 16 個獨立的分段同時跟蹤并同時采集
? 不同光束選項,實現最優的視場(FOV)
? 多目標跟蹤和橫向辨別能力
? FOV 檢測范圍高達 165 米(541 英尺),并且和目標相關(M16-LSR 相對于反光目標)
? 快速數據采集時間(高達 100 Hz)
? 具有各種光束選項,可適用于各種混合車輛配置
未來計劃
泛光 LiDAR 技術正在迅速發展。得力于新型 LiDAR 架構的深入開發和信號處理的持續改進,更新、更強大的解決方案指日可待。同時,廣闊的市場和大量的應用需求也是強有力的驅動因素。最終,泛光 LiDAR 技術將更具成本效益,并且其性能將在未來幾年完全取代機械式掃描儀,這也正是汽車行業專家所預期的。因此,已經被自動巡航車作為傳感器套件的一部分而采用的泛光 LiDAR 解決方案,將在下一代產品得以廣泛使用時發揮更為重要的作用。
基于 LeddarTech 專利技術、具有卓越量程和分辨率的 3D 固態泛光 LiDAR 即將推出,它能滿足先進的自動巡航檢測需求。





評論