機器人,英偉達的下一場革命

很多游戲粉絲聽說英偉達發了新卡,激動得去搜索相關的新聞,可看來看去,發布會上把“十年來最重要創新”、“全球首款光線追蹤 GPU”掛在嘴邊的老黃卻沒怎么提起新品在游戲上的應用。游戲粉絲有些失望,核彈還是那個核彈,皮衣也還是那件皮衣,但發布會上屢屢提起、演示的關鍵詞卻并不是他們熟悉的 3A 大作了。
本文引用地址:http://www.104case.com/article/201808/390917.htm類似的情況也出現在顯卡測評的視頻里,當一位 up 主通過機器學習的訓練效果來講解 NVIDIA Titan V 顯卡的性能時,彈幕上馬上刷起了“聽不懂”、“在說啥”的聲音。
游戲粉絲們也許不是很買賬,但對英偉達而言,人工智能卻是這家以圖形和計算起家的半導體公司遇上的最好機會。在深度學習井噴式爆發的那幾年,擅長向量和矩陣運算的英偉達 GPU 被許多學者、研究員用來進行研究和訓練自己的算法模型,甚至 Google Brain 和吳恩達這樣頂級的人工智能研究團隊和科學家也在使用英偉達的設備,久而久之,英偉達也將自己的注意力轉移到了深度學習這一剛剛在產業里興起的領域。
“不夠,還不夠智能”
“人工智能的第一階段,是開發自動化編程的軟件。第二階段,是將軟件應用于行業的自動化,這種自動化帶來的效率提升會刺激原有的市場。”在今年的臺北電腦展上,黃仁勛把人工智能的發展分為了三個階段,“第三階段,是 AI 走出計算機,影響外部的世界。”
依黃仁勛的定義,目前我們已經處于人工智能發展的第二階段,即人工智能開始初步應用于各行各業。

比如工廠里的人機協作,大型機械很容易在使用時誤傷到人,但如果給這些設備裝上傳感器,檢測身邊是否有人,實時作出是否要減速的判斷,在使用時就會安全許多。
再比如傳統的拆垛、堆垛設備,只要給設備加一個深度傳感器,它就能判斷出箱子的大小位置和重心,這時機器就能夠判斷出最佳操作位置,從而以最快的速度完成操作。
還有超市商場里,每天營業員都會在關門后花數個小時的時間整理、統計當天所剩貨品,現在市面上已經有能夠完成點貨和理貨功能的機器人,這些設備能給店家省下不少的人力。
這些都是時下已經投入使用的一些智能機器,但在英偉達高級軟件經理李銘博士看來,“這些智能是遠遠不夠的”。
“加一點智能進去,解決當前場景最急需的問題,看起來是個智能機械,但其實它對整個機器人本身的促進并沒有想象中那么大。”
李銘博士認為,這些智能機器人普遍存在著一些問題:
第一,軟件成本上升太快,在安防、服務、工廠,不同的場景里有著不同的需求,體現在軟件編程上,軟件架構的邏輯可能會全局推翻,這就導致了軟件開發的成本居高不下。
第二,具體到場景里,單個機械在應用時還需要單獨的調試。以工業機器人的機械臂為例,在工廠里需要為車床量身調試,設置具體操作參數,比如距離產線的距離,50cm 還是 60cm,10cm± 的誤差在生產線上是絕對不允許的。
第三,面對環境的變化適應性差,比如工廠里的光線發生變化,比如室外可能會發生的各種意外,現有的機器人是無法應對的。
第四,軟件更新,當功能有增加或者修改時,需要做很多額外的工作,比如改變程序的邏輯,甚至重新編程等等。
如前面黃仁勛提到人工智能的三個階段,智能從軟件開始,機器人從完成固定程序動作的普通機械,到今天“有一點點智能”的機器人,依賴的正是人工智能在各自行業的初步應用。所以要解決以上這些智能機器的問題,還需要回到軟件的層面,回到人工智能身上。
機器該怎么學習?
人工智能的發展“越來越抽象,越來越復雜”。從早期簡單的是與否的判斷,到后來精準的識別,可以在復雜的場景里找出特定的目標,再到后來,出現 AlphaGo 這樣可以做出主動的決策的 AI,甚至智能如 AlphaGo Zero,可以完全依靠“自學”實現快速成長。可以看到,軟件的智能水平是領先于我們常見的硬件智能的。
那么,人工智能在硬件上的部署遇到了哪些困難呢?
首先是計算力。硬件,尤其移動機器人上能夠搭載的計算力非常有限,這與 AlphaGo 這樣傾全公司算力訓練出來的 AI 不同。
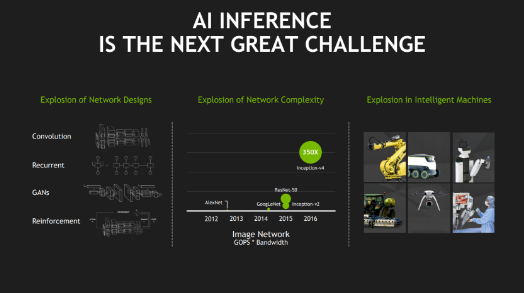
人工智能經過這么長時間的發展,在網絡的種類、復雜程度和處理的信息量上都發生了天翻地覆的變化。網絡種類上,從早期的 AlexNet 和 GoogleNet 到現在各種各樣的 GAN(生成對抗網絡)以及各種深度強化學習的網絡,它們各自網絡結構都有不同,開發者在適應最新的網絡上常常會遇到一些麻煩。
網絡變得越來越復雜,處理的信息量也在成倍地增長,算力需求越來越高的情況下,對搭載處理單元的體積有更多限制的機器人實際上存在著在智能水平上升級的障礙。
其次是訓練環境。對于 AlphaGo、DeepMind,科學家們可以設定一個基本規則,讓它永遠跑在計算機里,不停地訓練,技巧磨煉得越來越強大,但機器人的訓練卻遠遠沒有這么簡單。
在去年的 GTC 大會上,黃仁勛展示了加州大學伯克利分校的 AI 實驗室所做的曲棍球機器人實驗,在一個僅一米左右的直線上,伯克利的曲棍球機器人“艾達”足足試了 200 次才熟練地掌握了將球打入門框的技巧。
“這還只是曲棍球!”黃仁勛說道,“如果我想抬起一輛汽車呢?如果我想開門呢?如果我想讓機器人和醫生配合做手術呢?”










評論