交流調速的功率控制原理與斬波內饋調速

1)由于轉子電壓的頻率為變化的轉差頻率,因此必須要進行頻率變換,以使轉子和附加電源進行有功功率交換;
2)能夠連續地控制Pes的大小,以獲得平滑的無級調速。
另外,要合理確定Pes額定值,它將決定調速范圍。上述的技術要點是設計調速控制裝置應該注意的原則。
附加電源是轉子電磁功率控制的結構要點,它是Pes傳輸所必須的。傳統的方法例如串級(Cascade Control)、雙饋(Double Feed)等調速的附加電源都由
外部來提供,但外附電源使系統復雜化,而且在低同步調速時造成Pes在定子至外附電源之間的無謂循環,增大了定子損耗。較好的方法是在我國首創的斬波內饋調速,其原理如圖5所示。
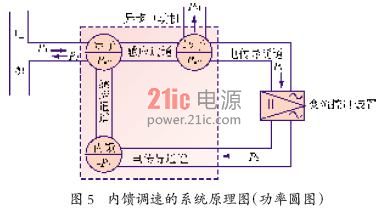
該系統的突出特征是采用了內饋調速的特殊異步機,在內饋電機的定子槽中,與原邊繞組同槽嵌放一個內饋繞組(前亦稱調節繞組),內饋繞組在旋轉磁場的作用下,感應出電動勢E3,其頻率為固定的電源工頻頻率。內饋繞組與變流控制裝置的輸出端聯接,接受從轉子移出的電轉差功率P3,此時內饋繞組處于發電狀態,并通過電磁感應抵消定子原邊輸入的多余電功率。定子的有功功率由調速前的P1變為P1-P3,此時的定子有功功率為
P1K=P1-P3=PM+ΣP (25)
分析表明,定子有功功率不含電轉差功率,只隨機械功率而變化,而且電機的損耗功率沒有增大。
內饋調速的調速范圍取決于電轉差功率的大小,Pes越大調速下限越低,調速范圍越大;反之Pes越調速范圍越小。Pes的大小取決于內饋繞組的感應電勢E3的量值,當E3=E20(轉子開路電勢)時調速可以從零開始。但無謂地擴大調速范圍必須付出相應的技術、經濟代價,因此,對于像風機、泵類調速范圍不需要很大的負載,就沒有必要把調速范圍設計得很寬。
內饋調速是基于轉子的電磁功率控制調速,與串級調速相比,由于加強了電機調速的內因,所以內饋調速沒有外附的變壓器,而且定子不含無謂循環傳輸的電轉差功率,進一步減小了電損耗。因此,內饋調速具有結構簡單,調速效率高的明顯優點,同目前的高壓變頻、串級等高效率調速相比,內饋調速是更高效、更經濟的調速。
6 內饋調速的斬波控制
6.1 問題的提出
前已敘及,調速控制時要盡量避免產生感性無功功率以提高功率因數,減小無功損耗。否則將使內饋調速電機的激磁電流和激磁功率劇烈增大,導致定子原繞組和內饋繞組無功損耗增大,嚴重影響電機的正常運行。
現在把注意力集中在調速控制的變流裝置上,問題出現在變流控制中有源逆變器的控制方式上。
為了連續控制從轉子移出的功率即內饋繞組的功率,實現轉速的無級調節,傳統的方法是采用移相控制。由于內饋繞組的功率
這樣,當內饋調速電機的有功功率隨逆變角茁的增大而減小時,而無功功率卻在相應增大,從而使電機運行惡化。
另外,移相控制的缺點是可靠性差。眾所周知,有源逆變對觸發脈沖的要求是嚴格的,任何觸發失誤都將導致逆變顛覆造成短路,不僅嚴重影響運行的可靠性,而且檢修也困難(無法在故障狀態進行分析、查找)。造成移相控制可靠性低的原因是:
1)觸發脈沖的移動。觸發線路復雜而且要求具有快速響應性,觸發線路抗干擾能力就降低。因為抗干擾強的觸發電路必然具有大時間常數的慣性環節,這和快速響應是矛盾的。
2)逆變器的容量較大,換相困難。移相控制的全部受控功率都要經過逆變器,逆變器的容量相對就要增大,致使換相矛盾突出,難度加大。實際上晶閘管有源逆變器的可靠性關鍵就在換相上,一旦換相失敗,逆變器就會發生短路故障,且無法自動恢復。
限于當時的技術水平,串級調速和第一、二代的內饋調速,采用的都是移相觸發控制,逆變器承擔著頻率變換和功率調節的雙重任務,怎樣改進都難免顧此失彼,多年的實踐證明,要從根本上解決問題只能另辟蹊徑。
6.2 斬波控制的調速原理
要克服移相控制的缺點,只有改為對逆變電流進行控制,簡單的方法是在直流回路實行斬波控制。圖6所示的斬波控制原理電路是在逆變器NB 兩端并聯一個斬波開關K。
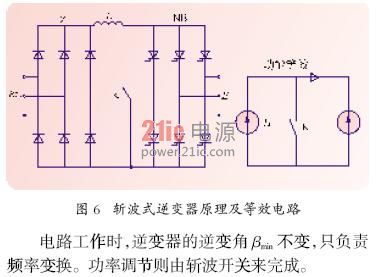
斬波開關對功率的控制作用是通過對電流平均值的控制實現的,斬波開關通常以恒頻調寬方式工作,即工作頻率一定,而開關導通時間可調。這樣,當斬波開關導通時,轉子電流經K而成回路,電流不流過逆變器,逆變器輸出功率P3=0,轉子的電磁功率轉化為機械功率。
當開關K打開時,轉子電流被迫流入逆變器,電流所產生的功率轉化為反饋功率。
根據電機調速的功控原理,電機轉速決定于機械功率(或反饋功率)的大小,在電流連續條件下,斬波電流和反饋電流互補,因此,只要分析其中任意一個電流對功率的控制作用,就可以說明調速機理了。
斬波控制的電機調速等效電路如圖7所示。
分析可知,電機轉速正比于機械功率,而機械功率正比于斬波開關電流,因此,調速就成為單只改變斬波開關電流的問題了。
為了簡化分析,設負載轉矩不變,轉子直流電流為定值,即Id=C。斬波開關工作時,斬波電流iK和逆變閥端電流iN波形如圖8所示。
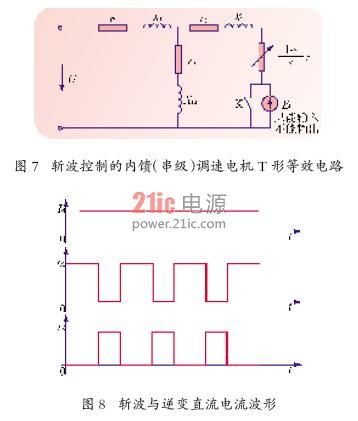

可見改變占空比即可實現對反饋功率P3的控制,從而實現轉速控制。
斬波控制實際上是數字化的功率控制,它較好地克服了移相控制的缺點,目前已成為電力電子技術的發展方向。把斬波技術與內饋調速有機結合所形成的斬波內饋調速,具有功率因數高、諧波分量小、逆變器和內饋繞組容量小、產品可靠性高等一系列優點,使內饋調速取得了質的提高,也是第三代內饋調速的典型特征。
7 新異步機調速分類與結論
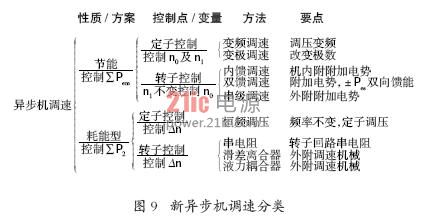
電機調速P理論揭示了電機調速的實質,使調速原理和調速性能有機聯系起來,結束了傳統電機學調速分類缺乏科學性的歷史。根據P理論,新異步機調速分類如圖9所示。
8 結語
1)電機調速的實質是基于功率控制。功率控制原則有兩種,一種是電磁功率控制,所改變的是電機理想空載轉速,調速是高效率的節能型調速;另一種是損耗功率控制,增大電機轉速降,調速是低效率、耗能型調速。電機轉速普遍表達為理想空載轉速與轉速降之差,所有電機調速方法都歸結于功率控制原理之中,或是從屬電磁功率控制原則,或是從屬損耗功率控制原則。
2)交流異步機調速的實質在于功率控制,電磁功率控制改變的是理想空載轉速,損耗功率控制增大轉速降。調速效率只取決于功率控制的屬性而與其它無關。
3)經典的調速理論按變f 、變s、及變P劃分調速方法缺乏科學性,電機學中的異步機轉速表達式是人為定義式而非公式,不能視為指導交流調速的理論依據。
4)內饋調速與變頻調速同屬電磁功率控制調速,只有作用對象區別,沒有本質區別。
5)凡電磁功率控制的調速,無論是以定子還是轉子為控制對象,調速都是高效率的,機械特性為平行曲線;而增大損耗功率的調速,調速效率較低,機械特性為匯交曲線。兩種調速的機械特性曲線的區別如圖10所示。
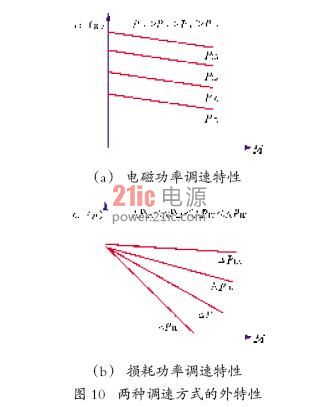
反之,凡機械特性為平行曲線的調速必然是電磁功率控制的高效率調速;而機械特性為匯交曲線的調速必然是增大損耗功率的低效率調速。這種簡明的推論對交流調速的選擇、應用具有十分簡便的指導意義。










評論