數據融合技術在車牌字符識別中的應用研究

摘要: 在車牌字符識別中,針對單一識別方法識別率不高的問題,提出了應用數據融合技術,將不同的識別方法有機地結合起來構成融合型識別系統,有效地、綜合地提高整個系統的識別性能。數據層選擇了加權平均算法,特征層選擇了人工神經網絡算法,決策層采用了模糊推理算法實現對車牌字符的最終識別。應用MATLAB 進行了仿真,并與單獨使用BP 神經網絡算法的識別率進行了比較,結果證明采用數據融合技術系統的識別率得到了較大提高,達到90%以上。
本文引用地址:http://www.104case.com/article/201808/387384.htm車牌識別系統是圖像模式識別領域的一個經典研究課題。對車牌識別技術的研究不但會極大促進數字圖像處理、計算機視覺、模式識別與人工智能等相關領域理論與實踐的發展,而且其在公共安全、交通管理、軍事部門等的實際應用價值也不可估量。一個典型的車牌識別系統由圖像采集、圖像預處理、車牌定位、字符分割以及字符識別幾部分組成。其中字符識別是車牌識別系統中的關鍵環節,識別方法的好壞直接影響到整個車牌最終的識別效果。在字符識別模塊,針對單一識別技術識別率較低的問題提出了從數據融合理論的角度出發,有效地、綜合地應用多種識別技術來提高系統的識別率。
1 數據融合的基本原理
數據融合技術實際上是對人腦綜合處理復雜問題的一種功能模擬。在多傳感器系統中由于各種傳感器提供的信息具有不同的特征:時變的或者非時變的;實時的或者非實時的;快變的或者緩變的;模糊的或者確定的;精確的或者不完整的;可靠的或者非可靠的;相互支持的或者互補的;也可能是相互矛盾或沖突的。而數據融合系統能充分利用多個傳感器資源、對各種傳感器及其觀測信息合理支配與使用,將各種傳感器在空間或時間上的互補或冗余信息依據某種優化準則組合起來,產生對觀測環境的一致性解釋和描述。因此,數據融合的目標是基于各種傳感器分離觀測信息,再通過對信息的優化組合導出更多的有效信息,它的最終目的是利用多個傳感器共同或聯合操作的優勢, 提高整個系統的有效性,消除單個或少量傳感器的局限性。
數據融合技術與經典信號處理方法有本質的區別,數據融合所處理的多傳感器信息不但具有更為復雜的形式,而且還可以在不同的信息層次上出現, 這些信息表征層次包括:數據層、特征層和決策層。直接在采集到的原始數據層上進行的融合稱為數據層融合, 數據層融合是最低層次的融合,它的優點在于能保持盡可能多的現場數據,提供其他融合層次所不能提供的細微信息, 但其局限性也是比較明顯的,主要原因在于數據層融合是在信息的最底層進行的,由于傳感器原始信息的不確定性、不完全性和不穩定性,對融合結果影響較大,穩定性較差。因此,數據層上的融合具有很大的盲目性,原則上不贊成直接在數據層上進行數據融合,而且數據層融合通常要求選用的傳感器必須是同類型傳感器或相同量級的傳感器。數據層上通常采用的融合方法有加權平均法、像素灰度值選擇融合方法、基于區域特征的融合方法、小波變換法、金字塔分解方法等。特征層融合是先對來自傳感器的原始信息進行特征提取,然后再對特征信息進行綜合分析和處理,特征層融合屬于中間層次的融合,也是最成熟、發展最完善的融合理論,它的優點是通過特征提取既實現了信息壓縮,又保留了最重要的信息。特征層融合通常采用的算法有參量模板法、聚類分析法、人工神經網絡等。決策層融合是一種高層次融合, 它能充分利用特征層融合的最終結果,采用適當的融合技術給出最終的檢測、控制、指揮、決策的依據,決策層融合的最大優點是具有容錯性,當一個或幾個傳感器出現錯誤時,通過適當的融合,系統最終還能獲得正確的結果。決策層融合通常所采用的方法有貝葉斯推斷、D-S證據理論、模糊集理論、專家系統等。總地說來,數據融合本質上是一個由底層至頂層,對多元信息進行融合,逐層抽象的信息處理過程。
2 基于數據融合理論的車牌字符識別
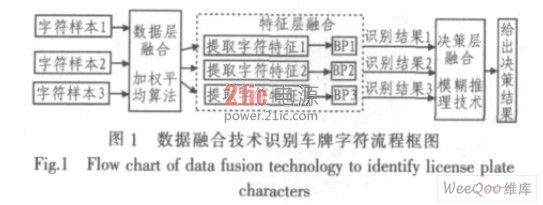
數據融合是一種對數據的綜合和處理技術,是許多傳統學科和新技術的繼承和應用,而對數據的綜合和處理能力反應在所選用的融合算法上。因此,在一個融合系統中,核心的問題是選擇合適的融合算法。經過對各種融合算法原理及優缺點的研究比較之后,最終確定了各層上所采用的融合算法: 數據層選擇了加權平均算法; 特征層選擇了人工神經網絡算法;決策層采用了模糊推理算法以實現對車牌字符的最終識別。圖1 為應用數據融合技術識別車牌字符的流程框圖。
2.1 數據層融合
加權平均融合算法,是通過融合各源圖像的冗余信息提高檢測的可靠性和融合后圖像的信噪比。而且它對來自不同傳感器的多幅源圖像進行數據層融合時,無需考慮各源圖像像素之間的相關性及配準技術,因此也是最簡單、最方便的數據層融合算法。
以3 幅圖像為例對加權平均算法進行敘述:設融合結果為FUS(i,j),輸入圖像為A(i,j)、B(i,j)和C(i,j),(i,j)是圖像中某點像素的坐標位置,該算法的表達式如式1 所示:
設計中對同一車輛采集了3 幀圖像,通過定位、字符分割、歸一化后,針對同一個車牌字符得到了3 個樣本,對這3個樣本的像素值進行平均融合, 得到融合以后的字符樣本,再將融合結果送往特征層進行下一步處理。與以往只用單幀圖像作為識別對象的識別算法比較,數據融合技術彌補了因單幀圖像拍攝效果不佳而造成無法識別的不足,這也是本設計的創新處之一。
2.2 特征層融合
神經網絡具有很強的容錯性和自學習、自組織及自適應能力, 能夠模擬復雜的非線性映射, 恰好滿足多傳感器信息融合技術處理的要求,在數據融合理論研究中受到高度重視,具有廣闊的應用前景。另外,在數據融合系統中要將來自不同類型傳感器的數據進行非線性關聯并形成一個融合矢量是非常困難的, 而神經網絡則能實現這一特殊功能。因此, 神經網絡分類器是本設計特征層融合首先考慮采用的算法。在諸多的神經網絡分類器中BP神經網絡算法數學意義明確、學習步驟分明, 而且網絡經訓練收斂之后進行識別時還具有計算量小、速度快等優勢。所以, 最終確定采用BP 神經網絡分類器作為特征層的融合算法。
具有單隱層的3 層BP 網絡能夠逼近任何有限函數,也能使處理的問題簡單化,而且車牌識別系統屬于一個小類別分類問題, 故采用3 層BP 神經網絡結構符合實際應用的要求。首先對經過數據層融合后的字符像素進行特征提取,設計*提取了3 類互補性強的字符特征: 字符原始特征,粗網格特征及水平、垂直投影特征和字符外圍輪廓特征,作為輸入信號分別送給3 個BP 神經網絡分類器, 根據識別系統的需求設置好各個網絡的初始參數后, 開始對3 個BP 網絡進行訓練,訓練過程中不斷調整網絡參數,最終使各個BP 網絡達到良好的收斂效果, 然后用訓練好的3 個BP 神經網絡分別對同1 個車牌字符進行識別。
2.3 決策層融合
決策層采用了模糊推理技術[6-7]作為最終判決的依據。模糊系統中,知識的抽取和表達比較方便,但學習能力較差,神經網絡可從樣本中進行有效的學習,但從網絡中提取知識的過程比較困難;模糊系統適合于處理結構化的知識,而神經網絡對處理非結構化信息更為有效。設計中選擇特征層神經網絡分類器的輸出作為決策層模糊推理系統的輸入還可實現數據整理、*和抑制噪聲,使獲取模糊規則的過程變得容易。所以,融合系統中模糊推理技術和神經網絡技術能克服自身不足、各取所長、優勢互補,從而使融合系統的性能得到改善。












評論