基于自適應(yīng)觀測(cè)器的三電平無(wú)速度傳感器DTC 系統(tǒng)

2.3 增益反饋矩陣的選取
為了易于選擇自適應(yīng)全階狀態(tài)觀測(cè)器的增益反饋矩陣,引入線性化分析方法,容易建模也容易分析[4]。將式(4)變換為
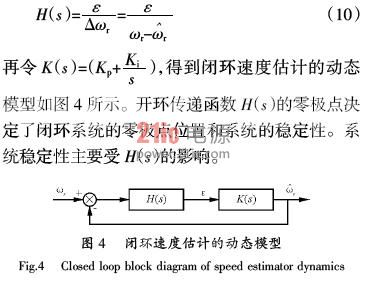
借助于閉環(huán)速度估計(jì)的動(dòng)態(tài)模型,可以方便對(duì)選擇的參數(shù)進(jìn)行分析。當(dāng)然還要借助于強(qiáng)大的Matlab 工具,便于選擇增益矩陣和速度PI 參數(shù)。
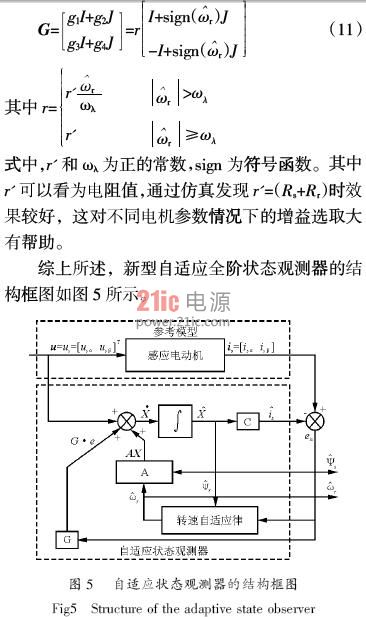
為了保證系統(tǒng)的穩(wěn)定性,并使得系統(tǒng)有著快速的響應(yīng)速度,結(jié)合零極點(diǎn)的位置和系統(tǒng)波特圖[4]。選擇出如下的反饋增益矩陣G。
3 三電平無(wú)速度傳感器DTC系統(tǒng)
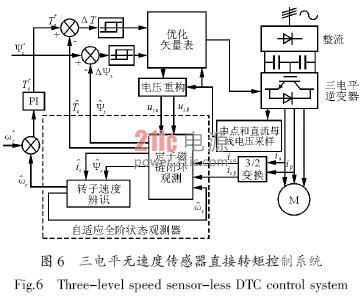
基于合成矢量表和自適應(yīng)全階狀態(tài)觀測(cè)器,可實(shí)現(xiàn)無(wú)速度傳感器三電平異步電機(jī)直接轉(zhuǎn)矩控制,其結(jié)構(gòu)框圖如圖6 所示。整個(gè)系統(tǒng)分為兩個(gè)模塊:直接轉(zhuǎn)矩控制模塊和自適應(yīng)全階狀態(tài)觀測(cè)器模塊。自適應(yīng)全階狀態(tài)觀測(cè)器的輸入為三電平逆變器的輸出電壓us和定子電流is。自適應(yīng)全階狀態(tài)觀測(cè)器模塊辨識(shí)出轉(zhuǎn)速棕r 和定子磁鏈棕s,轉(zhuǎn)速由速度自適應(yīng)律的式(7)辨識(shí)出,辨識(shí)的轉(zhuǎn)速參與控制,實(shí)現(xiàn)無(wú)速度傳感器DTC運(yùn)行。采用合成矢量的PWM控制策略,可以有效地將三電平逆變器的PWM 控制和異步電動(dòng)機(jī)的DTC 控制加以分離,相對(duì)獨(dú)立地實(shí)現(xiàn)不同的控制目標(biāo),從而避免了互相矛盾的問(wèn)題,為提高控制性能拓展了空間。
形圖。可見(jiàn),采用新型自適應(yīng)全階狀態(tài)觀測(cè)器結(jié)構(gòu),系統(tǒng)在低速甚至于零速狀態(tài)下可穩(wěn)定運(yùn)行,能夠準(zhǔn)確的觀測(cè)出定子磁鏈和轉(zhuǎn)速,且具有較好的動(dòng)靜態(tài)性能。另外,合成矢量方法較好的控制了系統(tǒng)中點(diǎn)電壓,中點(diǎn)電壓偏移控制在0.5 V 以內(nèi),如圖(d)所示,并且簡(jiǎn)化了矢量選擇,很好地抑制了dv/dt的變化,為提高控制性能奠定了基礎(chǔ)。
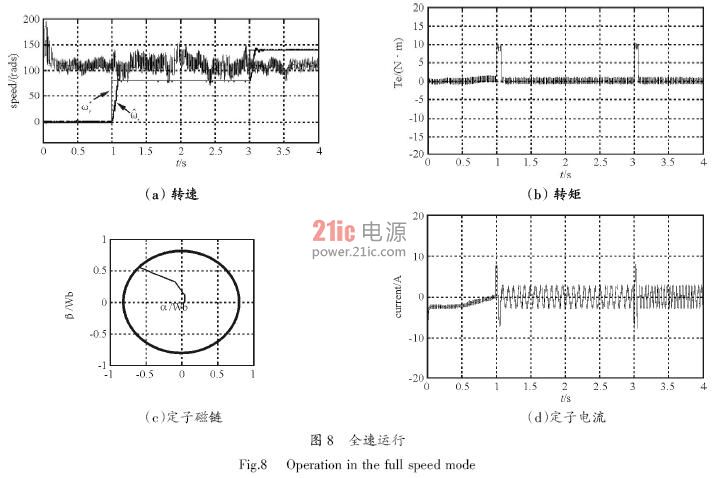
4.2 全速范圍穩(wěn)定運(yùn)行
預(yù)設(shè)轉(zhuǎn)速為1 rad/s,空載,仿真時(shí)間4 s,1 s后轉(zhuǎn)速突變?yōu)?0 rad/s,3 s后轉(zhuǎn)速突變?yōu)?40 rad/s。圖8 為該情況下的波形圖,(a)為轉(zhuǎn)速波形,棕r* 為給定轉(zhuǎn)速,棕r為辨識(shí)轉(zhuǎn)速;(b )為對(duì)應(yīng)的轉(zhuǎn)矩波形圖;
(c)為定子磁鏈的波形圖;(d )為定子電流的波形圖。可見(jiàn)采用合成矢量方法和新型自適應(yīng)全階狀態(tài)觀測(cè)器結(jié)構(gòu),系統(tǒng)在全速范圍內(nèi)穩(wěn)定運(yùn)行,并且具有良好的動(dòng)靜態(tài)性能。
5 結(jié)語(yǔ)
合成矢量方法為三電平逆變器實(shí)現(xiàn)DTC 算法提供了一個(gè)良好的接口,能有效地控制三電平逆變器的中點(diǎn)電壓,并成功地防止了過(guò)高的電壓跳變,顯著簡(jiǎn)化了空間矢量選擇。新型自適應(yīng)全階觀測(cè)器方法能夠準(zhǔn)確地觀測(cè)定子磁鏈,應(yīng)用于異步電動(dòng)機(jī)的DTC控制中具有出色的魯棒性。實(shí)現(xiàn)三電平逆變器供電下的異步電動(dòng)機(jī)無(wú)速度傳感器運(yùn)行,并在低速情況下也能達(dá)到良好的穩(wěn)態(tài)和動(dòng)態(tài)性能。仿真表明了這種方法的有效性。













評(píng)論