基于STM32的四旋翼飛行器控制系統

2.4 電機驅動模塊
2.4.1 電機驅動原理
本設計選用直流無刷電機作為飛行器的動力驅動設備。根據無刷直流電機的換向原則,無刷直流電機的控制形式分為:開環控制、轉速負反饋控制和電壓反饋加電流正反饋控制。其中,開環控制無反饋進行校對,應用于轉速精度要求不高的場所;轉速負反饋控制的機械性能好;電壓反饋加電流正反饋控制一般應用在動態性能要求高的場合。針對本設計來說,需要實時調整電機的轉速,并且調速頻率比較大,所以在本設計中采用電壓反饋加電流正反饋控制方法。
2.4.2 電機驅動電路設計
根據電機控制原理,本設計將電機驅動電路劃分為三個部分:微處理器、反電動勢檢測和功率驅動部分。
(1)微處理器
由于無刷直流電機的換向頻率比較高,不宜使用低頻率的處理器,再加上電機的旋轉會產生旋轉的磁場,對處理器有很大的干擾。通過比較,本設計采用ATMEGA8單片機作為電機驅動微處理器。
(2)反電動勢檢測
在換向的過程中,需要不停地檢測轉子的位置,通過轉子產生的反電動勢就可以知道轉子的位置信息,通過分壓衰減原理,檢測電機三相反電動勢電壓相對中性點的電壓,從而確定轉子的位置。反電動勢檢測電路如圖5所示。
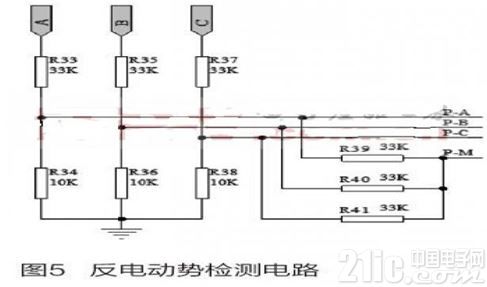
其中,A、B、C端子為電機三相電壓,R33~R38為分壓電阻,P-A、P-B、P-C分別三相反電動勢對應電壓,P-M為中性點電壓。
(3)功率驅動
功率驅動是為了給電機提供大的電流,使其達到能夠穩定運行的目的,本設計采用并聯MOS管提高輸出的電流,在每一相上橋臂并聯3個P溝道MOS管,達到三相全橋可控的目的,在每一相的下橋臂上也并聯3個N溝道MOS管。
3 硬件系統調試
3.1 PWM控制飛行器驅動電機調試
通過對4個電機進行通電,加上不同占空比的PWM波形,來控制電機的轉速,記錄電源電壓、電流的變化情況,在穩定輸出11.1V,不同的占空比下,電源電流變化情況如表1所示。

由表1可知:占空比越大,電機驅動工作需要的電流越大;在占空比達到接近極限值時,電流輸出變化很小,實驗表明硬件系統能夠可靠運行。
3.2 無線通訊調試
通過測試無線的連通性、傳輸距離和丟包率,來確定無線模塊的性能特性。把遙控器設置為發送模式,地面站設置為接收模式,利用地面站的報警燈來指示接收的狀態,成功接受一次閃一下,通過改變遙控器和接收機之間的距離,記錄一分鐘內指示燈閃爍的次數,來評估無線傳輸質量;測試分別在教學樓樓道和空曠操場進行,詳細記錄見表2。
由表2可知:無線通訊在15m之后的傳輸效果有明顯下降,這是由無線通信模塊的功率決定的,實驗表明無線通信部分在設計需求范圍內能夠可靠運行。
3.3 綜合調試
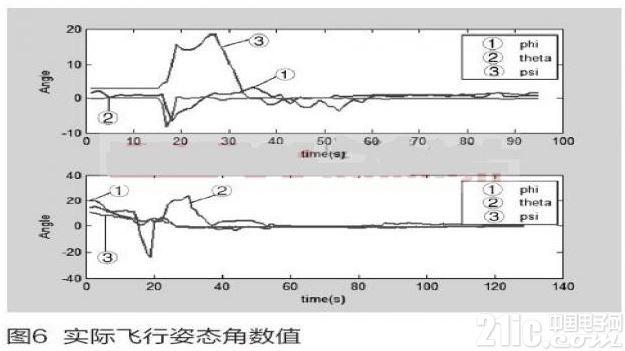
圖6為PID控制算法下載到四旋翼飛行器控制器進行實際飛行控制的姿態曲線圖,其中①代表橫滾角,②代表俯仰角,③代表偏航角。圖6為飛行器受到側風干擾后,姿態角受控重新收斂到平穩(0,0,0)狀態的角度數據。下圖為飛行器從某一個姿態受控收斂到平穩(0,0,0)狀態的角度數據。從實驗結果可以看出系統能穩定運行。
4 結束語
完成了四旋翼飛行器控制系統方案設計以及系統各個模塊硬件器件選型和電路設計,進行了系統硬件電路的調試,實驗結果表明,系統能夠穩定、可靠運行。
- STM32單片機中文官網
- STM32單片機官方開發工具
- STM32單片機參考設計







評論