基于TB67S109A電機驅動器的步進電機設計

一、作品簡介
本文引用地址:http://www.104case.com/article/201807/384100.htm步進電機是將電脈沖信號轉變為角位移或線位移的開環控制電機,是現代數字程序控制系統中的主要執行元件,應用極為廣泛。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度,稱為“步距角”,它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。
步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為步進電機供電,步進電機才能正常工作,驅動器就是為步進電機分時供電的,多相時序控制器。
雖然步進電機已被廣泛地應用,但步進電機并不能像普通的直流電機,交流電機在常規下使用。它必須由雙環形脈沖信號、功率驅動電路等組成控制系統方可使用。

此次作品主要采用TB67S109A電機驅動器。TB67S109A是一種配備PWM斬波器的兩相雙極步進電機驅動器,內置時鐘解碼器。特點有以下幾點:
1、能夠控制一臺雙極步進電機
2、能夠用PWM來控制恒流驅動
3、允許全步,半步,四分之一,1/8,1/16,1/32步運行。
4、錯誤檢測(TSD/ISD)信號輸出功能。
5、內置錯誤檢測電路(熱關斷(TSD),過電流關斷(ISD),以及上電復位(POR)
5、可通過外電阻與電容自定義電機的斬波頻率。

三、系統設計
備注:步進電機不能直接接到工頻交流或直流電源上工作,而必須使用專用的步進電機驅動器,它由脈沖發生控制單元、功率驅動單元、保護單元等組成。驅動單元與步進電動機直接耦合,也可理解成步進電動機微機控制器的功率接口。
四、原理圖
4.1 TB67S109A驅動電路
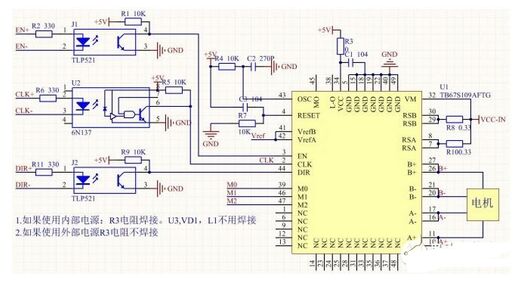
備注:步進電機驅動器,它是把控制系統發出的脈沖信號轉化為步進電機的角位移,或者說:控制系統每發一個脈沖信號,通過驅動器就使步進電機旋轉一個步距角。也就是說步進電機的轉速與脈沖信號的頻率成正比。所以控制步進脈沖信號的頻率,就可以對電機精確調速;控制步進脈沖的個數,就可以對電機精確定位。
4.2 邏輯電路
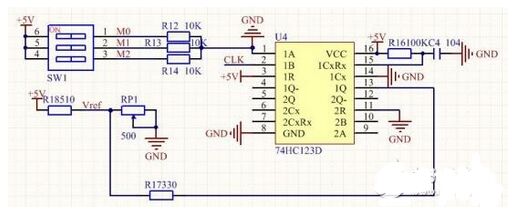
備注:如上圖所示,這是一個由74HC123D構成的雙重可再觸發的單穩態多諧振蕩器,它的功能是在沒有接收到脈沖信號時候自動將驅動電流降為一半。而M0、M1、M2的作用是選擇細分。
4.3 電源電路
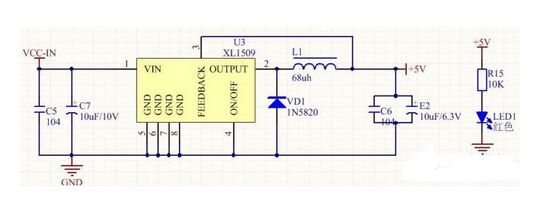
備注:由于單片機工作在5V,而步進電機的工作電壓為幾十V,所以需要XL1509對電源進行穩壓至5V,給單片機供給電壓。
五、材料清單(BOM表)主要物料
主要的元器件物料。

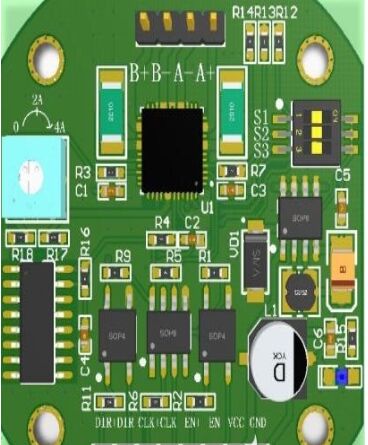
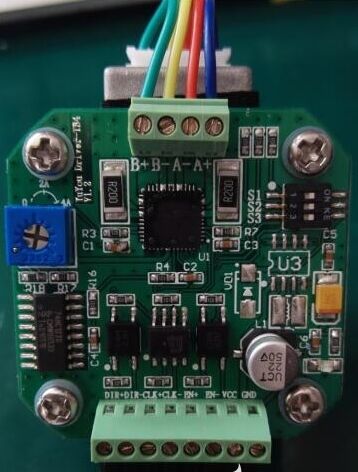
六、PCB實物圖
七、總結
在此次電子制作中,發現了一些步進電機需要特別注意的事項,在這里提出來給大家參考參考:
1、步進電機應用于低速場合---每分鐘轉速不超過1000轉,(0.9度時6666PPS),最好在1000-3000PPS(0.9度)間使用,可通過減速裝置使其在此間工作,此時電機工作效率高,噪音低;
2、步進電機最好不使用整步狀態,整步狀態時振動大;
3、電機在較高速或大慣量負載時,一般不在工作速度起動,而采用逐漸升頻提速,一是電機不失步,二是可以減少噪音同時可以提高停止的定位精度;
4、應遵循先選電機后選驅動的原則。










評論