基于STC12C5A60S2的教育機器人系統電路設計

目前許多高等教育院校采用教育機器人進行課堂教學和培養學生的創新能力。本文設計的教育機器人通過紅外光電傳感器陣列檢測路面信息并利用模糊自整定PID算法將采集的路面信息和電機運行數據進行實時處理,實現教育機器人的智能巡航并將機器人的狀態顯示輸出。
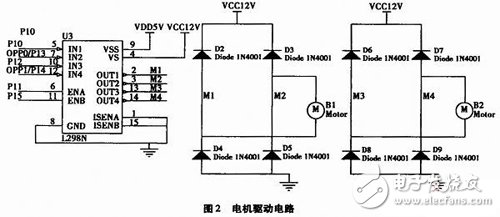
本文引用地址:http://www.104case.com/article/201710/369457.htm電機驅動電路設計
本系統使用的直流電機額定電壓為12 V,額定轉速為300 rpm。電機驅動電路采用專用芯片L298N作為電機驅動芯片。用該芯片作為電機驅動,不僅穩定性好,大大地簡化驅電路,而且驅動能力大,有利于電機轉速的穩定。電機驅動電路如圖2所示。
車速檢測模塊電路設計
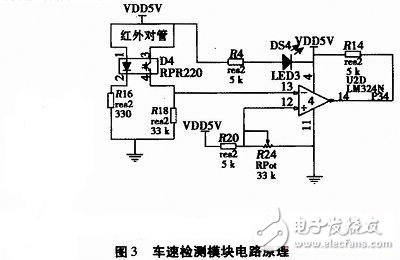
教育機器人系統通過車速檢測模塊來讀取當前車速。采用的方法是在后左右輪上分別粘貼一個均勻分布有黑白條紋的編碼盤,利用圖檢測電路來對編碼盤上的黑白條紋進行檢測。當車輪轉動時,紅外接收管接收到的反射光強弱高低變化就會產生與車輪轉速相對應的脈沖信號,將該脈沖信號進行放大整形后輸入單片機的引腳P3.4和P3.5,記錄單位時間內所得到的脈沖數,就能夠表示出當前車左右輪子的速度,同時通過累加可以計算出小車所行走的路程。
主要介紹以STC12C5A60S2單片機為核心的教育機器人設計,闡述了教育機器人的硬件電路設計、軟件模塊以及控制算法設計。系統設計的紅外光電檢測陣列和模糊自整定PID控制器,使教育機器人在行走時更平穩,且控制方法簡單、實用。該系統可用于無人駕駛、自動探測等人工智能等領域。












評論