智能電動平衡車電路設計圖 —電路圖天天讀(148)

近年來,兩輪自平衡電動車以其行走靈活、便利、節能等特點得到了很大的發展。國內外有很多這方面的研究,也有相應的產品。兩輪平衡電動車的運作原理主要是建立在一種被稱為“動態穩定”(Dynamic Stabilization)的基本原理上,也就是車輛本身的自動平衡能力。以內置的精密固態陀螺儀(Solid-State Gyroscopes)來判斷車身所處的姿勢狀態,透過精密且高速的中央微處理器計算出適當的指令后,驅動馬達來做到平衡的效果。
本文引用地址:http://www.104case.com/article/201710/369163.htm 
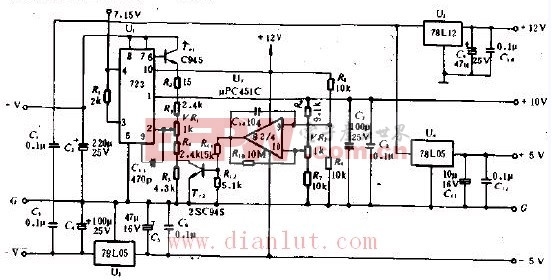
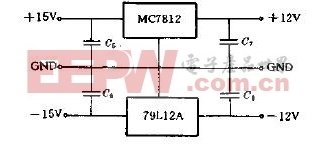
電源接口電路圖

測速模塊接口
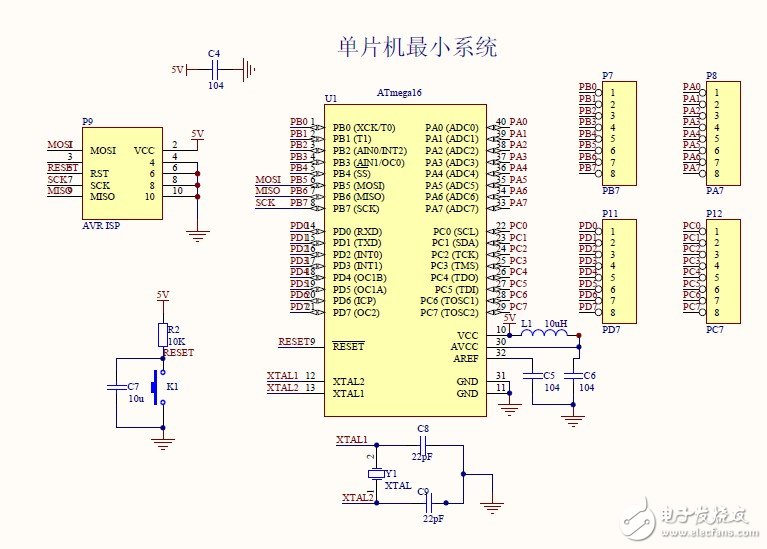
單片機最小系統
車主控模塊主要由穩壓模塊、isp下載口、無線模塊、加速度傳感器、陀螺儀、74ls04s施密特觸發器、電源指示燈組成。其中主控芯片的主要功能是采集加速度傳感器、陀螺儀、光電編碼器、以及無線模塊的數據進行運算,然后進行反饋。不僅是主要的數據運算中心又是控制中心。



評論