基于TMS320LF2407A的機器人運動控制系統軟件設計

隨著計算機、網絡、機械電子、信息、智能移動機器人是一類能夠通過移動機器人技術研究綜合了多學科領域的知識,關鍵技術可分為:路徑規劃、導航定位、路徑跟蹤與運動控制技術。路徑規劃又可分為全局和局部路徑規劃。全局路徑規劃是根據移動機器人總體任務進行路徑規劃,將總體路徑任務分解,并建立全局地形數據庫;局部路徑規劃是根據全局規劃分解的子任務,結合移動機器人當前狀態信息,實時規劃可行路徑;導航定位技術確定移動機器人在全局地圖中的位置,并實時得到機器人與路徑跟蹤的相對位置關系,其關鍵技術是多傳感器信息處理與數據融合技術。路徑跟蹤與運動控制技術的任務是控制移動機器人跟蹤局部規劃給出的路徑,結合導航定位系統得到機器人本身狀態信息與道路信息,完成航向和速度控制。移動機器人的路徑規劃、導航控制以及路徑跟蹤與運動控制技術是相互關聯的,任何一個系統的不完善都會導致整體性能的下降。
本文通過對移動機器人的研究,實現了基于渡越時間法的超聲波測距模塊設計,為機器人提供簡單方便的障礙物距離檢測。本文主要完成對主控板控制器軟件設計、電機驅動控制器軟件設計和超聲波測距軟件的設計,使開發系統能夠服務于移動機器人研究的通用開發平臺。
移動機器人技術研究綜合了多學科領域的知識,關鍵技術可分為:路徑規劃、導航定位、路徑跟蹤與運動控制技術。路徑規劃又可分為全局和局部路徑規劃。全局路徑規劃是根據移動機器人總體任務進行路徑規劃,將總體路徑任務分解,并建立全局地形數據庫;局部路徑規劃是根據全局規劃分解的子任務,結合移動機器人當前狀態信息,實時規劃可行路徑;導航定位技術確定移動機器人在全局地圖中的位置,并實時得到機器人與路徑跟蹤的相對位置關系,其關鍵技術是多傳感器信息處理與數據融合技術。路徑跟蹤與運動控制技術的任務是控制移動機器人跟蹤局部規劃給出的路徑,結合導航定位系統得到機器人本身狀態信息與道路信息,完成航向和速度控制。
1主控板軟件設計
主控板硬件完成模塊管理、設備通訊及機器人定位脈沖檢測等內容。在實際應用中,主控板硬件還負責超聲波測距的軟件管理。
主控板硬件中只有主控板控制器需要進行軟件設計。主控板控制器TMS320LF2407A的主要任務是超聲波測距的軟件設計管理和其他一些基本設置內容,包括電機碼盤的正交編碼脈沖檢測。初始選定TMS320LF2407A作為主控板控制器是考慮到此控制系統可以作為以后機器人應用的平臺,可以在TMS320LF2407A里嵌入實時系統,提升系統性能,方便接口開發。
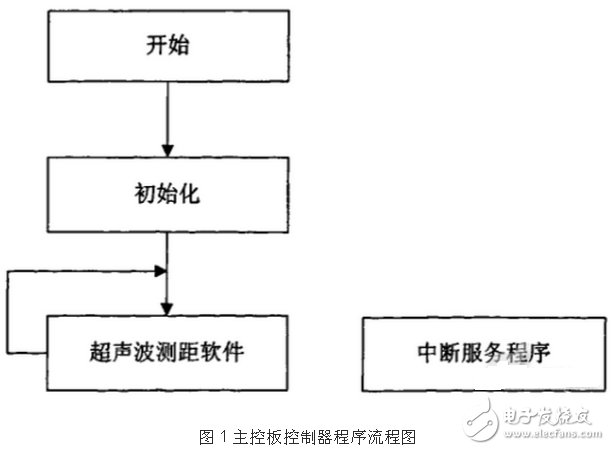
主控板控制器的軟件設計內容包括模塊初始化、串口通訊、正交編碼脈沖檢測和超聲波測距軟件。這里介紹模塊初始化串口通訊和正交編碼脈沖檢測等內容。圖1主控板控制器程序流程圖。










評論