傳感器在機器人控制中的信息融合技術(shù)

設(shè)計一款可以尋線,沖線并在過程中實現(xiàn)投球功能的機器人,需要傳感器技術(shù)的支持,在實驗中機器人的整體結(jié)構(gòu)中安裝了三個紅外傳感器和一個光感傳感器,這里主要分析各傳感器的實際應(yīng)用總結(jié)。
本文引用地址:http://www.104case.com/article/201710/367862.htm本論文主要介紹是以單片機ATmega16為智能控制系統(tǒng)核心,在移動的機器人系統(tǒng)中應(yīng)用光感傳感器實現(xiàn)機器人對障礙物的一系列行為;通過紅外傳感器實現(xiàn)機器人在移動過程中對黑色膠條的尋線,轉(zhuǎn)彎的過程。
1.紅外傳感器的應(yīng)用
紅外傳感器一般是由光學(xué)系統(tǒng),探測器,信號調(diào)理電路及顯示單元等組成的。紅外探測器是紅外傳感器的核心,它是利用紅外輻射與物質(zhì)相互作用所呈現(xiàn)的物理效應(yīng)來探測紅外輻射的。自然界中任何物體只要溫度高于絕對零度都能產(chǎn)生紅外輻射,而且溫度越低的物體輻射的紅外線波長越長,根據(jù)需要通過調(diào)節(jié)光暈的大小精確度選擇性的接受某一定范圍內(nèi)的波長就可以達(dá)到測量的目的,紅外傳感器能把紅外輻射量變化轉(zhuǎn)換成電量變化。
本次實驗中我們用的SHARP電紅外傳感器,它的制作簡單,成本低,安裝比較方便,性能穩(wěn)定,但是因為長期的使用,其精度有所降低。
在機器人行進(jìn)中,我們借助紅外傳感器和地板上的色帶軌跡可以沿著既定路線自動行駛,路徑可任意,由于我們機器人的展示在室外,機器人在辨識路徑時,可能受到自然環(huán)境下可見光的影響,導(dǎo)致光感傳感器辨識不準(zhǔn),而紅外傳感器可以濾除自然光照條件下的各種光,可以使得反饋值的準(zhǔn)確性大大增加。
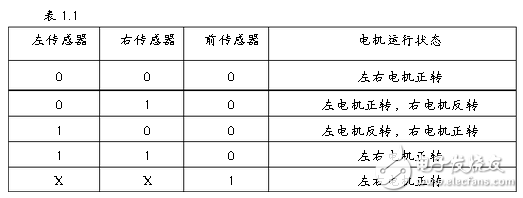
因為我們的軌跡線是黑色的而兩側(cè)是白色的,左側(cè)的傳感器控制右電機,而右側(cè)的傳感器控制左電機。假設(shè)機器人的縱軸中線向左偏離黑色軌道線時,其中右側(cè)傳感器的光電管探測到軌跡線反射回來,是該傳感器輸出為高電平,而左側(cè)傳感器仍保持原狀態(tài),輸出為低電平。通過與程序中的數(shù)值比較(見表1.1),此刻應(yīng)該反饋的結(jié)果是左側(cè)電機正轉(zhuǎn),右側(cè)電機反轉(zhuǎn),使得車身相反方向轉(zhuǎn)動(角度可以通過程序控制,且轉(zhuǎn)角度越小,行進(jìn)過程中越精確,時間停頓越小),這樣偏離的方向可以修正。在矯正路徑中,兩只電機不斷交替工作,是機器人實際上是緊靠著軌跡線向前方進(jìn)行“之”字形運行的。我們的機器人上的第三只傳感器作為沖線裝置使用,它的優(yōu)先級比另外兩個要高,當(dāng)其反饋一個高電平以后,其余兩個傳感器的反饋信號直接屏蔽,機器人直線運行沖出終點線。
因為第三只傳感器優(yōu)先級的問題我們再設(shè)計中結(jié)構(gòu)和角度的設(shè)計,需要不斷在實驗中修改,以達(dá)到最滿意我們要求的精度。
2.光電傳感器
光感式傳感器是基于光電效應(yīng)的傳感器,在收到可見光照射后即產(chǎn)生光電效應(yīng),將光信號轉(zhuǎn)換成電信號輸出。光電傳感器一般是由光源,光學(xué)通路和光電元件三部分組成。光強,光線的遮擋,透射,反射等測量多種物理量,如尺寸,位移速度,溫度等,也因此這是一種應(yīng)用極廣泛的重要敏感器件。
我們在實驗中應(yīng)用的是反射型光電開關(guān),它在光電器的一端有兩個感受器,一個是發(fā)射器,一個是接收器。若再在發(fā)射器延長的一定范圍內(nèi),若無障礙物,則不會產(chǎn)生任何反饋,處于低電平狀態(tài),機器人的機械臂仍維持原狀態(tài);當(dāng)其方向上產(chǎn)生障礙物遮蔽,則會在傳感器和遮擋物之間形成光線反饋到接收器上,光電器會產(chǎn)生一個脈沖反饋回cpu,使得機械臂產(chǎn)生動作。
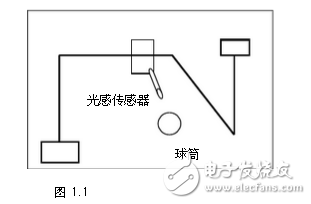
機器人的行進(jìn)中,考慮到機械臂在執(zhí)行一系列動作時會產(chǎn)生一定時間的延時,故我們將光電傳感器成45度角向前傾斜,提前感知圓柱筒,當(dāng)光感器感知遮蔽物時,機械臂進(jìn)行反轉(zhuǎn),并將爪中的小球投入圓筒中,完成投球動作。(圖1.1)
在不斷的實驗測量中,我們不斷調(diào)整機械臂的高度,光感器的角度,與遮蔽物的距離,以達(dá)到最好的測量效果,使小球精確的投入前提下,盡量不減緩小車前進(jìn)的速度。
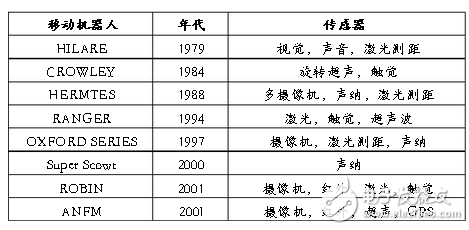
以上兩種只是我們在制作簡易的移動機器人中傳感器的使用,在實際的實驗室創(chuàng)作中還會用很多不同種類的傳感器。機器人是一門涉及技術(shù)領(lǐng)域非常廣泛的學(xué)科,其中傳感器和控制技術(shù)是核心的技術(shù),所以絕大部分機器人應(yīng)用中都可以看到傳感器的存在,所以多傳感信息融合技術(shù)在機器人領(lǐng)域有著廣闊的應(yīng)用前景。而最突出的,應(yīng)該是很多研究機構(gòu)為了探討多傳感器數(shù)據(jù)融合的一般規(guī)律而在實驗室設(shè)計的各種可移動器人或各種環(huán)境下的自動駕駛裝置。從網(wǎng)上搜尋了一些多傳感器融合的比較著名的作品 。
而這種多傳感器信息融合系統(tǒng)與單傳感器信號處理方式相比,多傳感器信息融合系統(tǒng)可以有效的利用傳感器資源,可以更大程度的獲得被測目標(biāo)和環(huán)境的信息量。多傳感器信息融合和單傳感器信號處理方法之間也存在本質(zhì)的區(qū)別,其關(guān)鍵在于信息融合所處理的多傳感器信息具有更復(fù)雜的形勢,而且可以在不同的信息層次上出現(xiàn)。
多傳感器信息融合的基本目標(biāo)是基于各傳感器分離觀測信息,通過對信息的優(yōu)化組合導(dǎo)出更多有效信息,這是最佳協(xié)同作用的結(jié)果。它的最終目的是利用多個傳感器共同或聯(lián)合操作的優(yōu)勢,來提高整個傳感器系統(tǒng)的有效性。
多傳感器信息融合技術(shù)在移動機器人中的應(yīng)用現(xiàn)在已發(fā)展成為一個熱門的研究領(lǐng)域,為移動機器人探索不確定和未知環(huán)境提供了一種技術(shù)途徑。而移動機器人是一個多學(xué)科交叉發(fā)展的領(lǐng)域,現(xiàn)今只是設(shè)計了比較底層的機器人硬件和軟件,以后需要完善這些理論和結(jié)果,此外,還有許多問題需要繼續(xù)深入的研究。












評論