步進電機解析,步進電機的類型分類及步進電機的制動原理

步進電機又稱為脈沖電機,基于最基本的電磁鐵原理,它是一種可以自由回轉的電磁鐵,其動作原理是依靠氣隙磁導的變化來產生電磁轉矩。其原始模型是起源于年至年間。年前后開始以控制為目的的嘗試,應用于氫弧燈的電極輸送機構中。這被認為是最初的步進電機。二十世紀初,在電話自動交換機中廣泛使用了步進電機。由于西方資本主義列強爭奪殖民地,步進電機在缺乏交流電源的船舶和飛機等獨立系統中得到了廣泛的使用。二十世紀五十年代后期晶體管的發明也逐漸應用在步進電機上,對于數字化的控制變得更為容易。到了八十年代后,由于廉價的微型計算機以多功能的姿態出現,步進電機的控制方式更加靈活多樣。
本文引用地址:http://www.104case.com/article/201710/367433.htm步進電機相對于其它控制用途電機的最大區別是,它接收數字控制信號電脈沖信號并轉化成與之相對應的角位移或直線位移,它本身就是一個完成數字模式轉化的執行元件。而且它可開環位置控制,輸入一個脈沖信號就得到一個規定的位置增量,這樣的所謂增量位置控制系統與傳統的直流控制系統相比,其成本明顯減低,幾乎不必進行系統調整。步進電機的角位移量與輸入的脈沖個數嚴格成正比,而且在時間上與脈沖同步。因而只要控制脈沖的數量、頻率和電機繞組的相序,即可獲得所需的轉角、速度和方向。
我國的步進電機在二十世紀七十年代初開始起步,七十年代中期至八十年代中期為成品發展階段,新品種和高性能電機不斷開發,目前,隨著科學技術的發展,特別是永磁材料、半導體技術、計算機技術的發展,使步進電機在眾多領域得到了廣泛應用。

步進電機控制技術及發展概況
作為一種控制用的特種電機,步進電機無法直接接到直流或交流電源上工作,必須使用專用的驅動電源步進電機驅動器。在微電子技術,特別計算機技術發展以前,控制器脈沖信號發生器完全由硬件實現,控制系統采用單獨的元件或者集成電路組成控制回路,不僅調試安裝復雜,要消耗大量元器件,而且一旦定型之后,要改變控制方案就一定要重新設計電路。這就使得需要針對不同的電機開發不同的驅動器,開發難度和開發成本都很高,控制難度較大,限制了步進電機的推廣。
由于步進電機是一個把電脈沖轉換成離散的機械運動的裝置,具有很好的數據控制特性,因此,計算機成為步進電機的理想驅動源,隨著微電子和計算機技術的發展,軟硬件結合的控制方式成為了主流,即通過程序產生控制脈沖,驅動硬件電路。單片機通過軟件來控制步進電機,更好地挖掘出了電機的潛力。因此,用單片機控制步進電機已經成為了一種必然的趨勢,也符合數字化的時代趨。
步進電機的類型
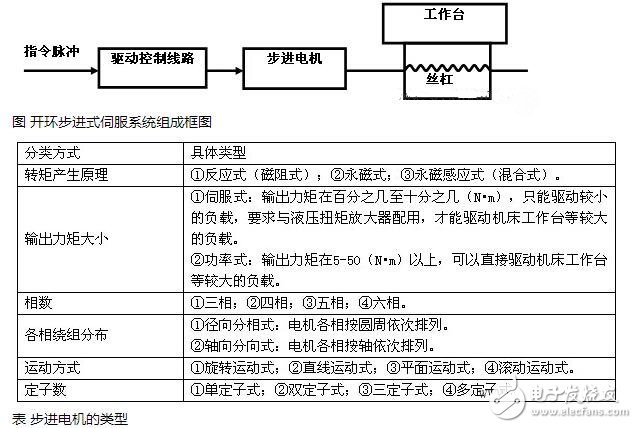
步進電機從其結構形式上可分為反應式步進電機(Variable Reluctance,VR)、永磁式步進電機Permanent Magnet,PM)、混合式步進電機(Hybrid Stepping,HS)、單相步進電機、平面步進電機等多種類型,在我國所采用的步進電機中以反應式步進電機為主。步進電機的運行性能與控制方式有密切的關系,步進電機控制系統從其控制方式來看,可以分為以下三類:開環控制系統、閉環控制系統、半閉環控制系統。半閉環控制系統在實際應用中一般歸類于開環或閉環系統中。[1]
反應式:定子上有繞組、轉子由軟磁材料組成。結構簡單、成本低、步距角小,可達1.2°、但動態性能差、效率低、發熱大,可靠性難保證。
永磁式:永磁式步進電機的轉子用永磁材料制成,轉子的極數與定子的極數相同。其特點是動態性能好、輸出力矩大,但這種電機精度差,步矩角大(一般為7.5°或15°)。
混合式:混合式步進電機綜合了反應式和永磁式的優點,其定子上有多相繞組、轉子上采用永磁材料,轉子和定子上均有多個小齒以提高步矩精度。其特點是輸出力矩大、動態性能好,步距角小,但結構復雜、成本相對較高。
按定子上繞組來分,共有二相、三相和五相等系列。最受歡迎的是兩相混合式步進電機,約占97%以上的市場份額,其原因是性價比高,配上細分驅動器后效果良好。該種電機的基本步距角為1.8°/步,配上半步驅動器后,步距角減少為0.9°,配上細分驅動器后其步距角可細分達256倍(0.007°/微步)。由于摩擦力和制造精度等原因,實際控制精度略低。同一步進電機可配不同細分的驅動器以改變精度和效果。
步進電機:一種將電脈沖信號變換成相應的角位移或直線位移的機電執行元件。
數控裝置輸出的進給脈沖數量、頻率和方向經過驅動控制電路達到步進電機后,可以轉換為工作臺的位移量、進給速度和進給方向。
步進電機的制動原理
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。這一線性關系的存在,加上步進電機只有周期性的誤差而無累積誤差等特點。使得在速度、位置等控制領域用步進電機來控制變的非常的簡單。
1、步進電機的構造(以5相步進為例)
步進電機的構造主要采用圖示的方式進行講解:
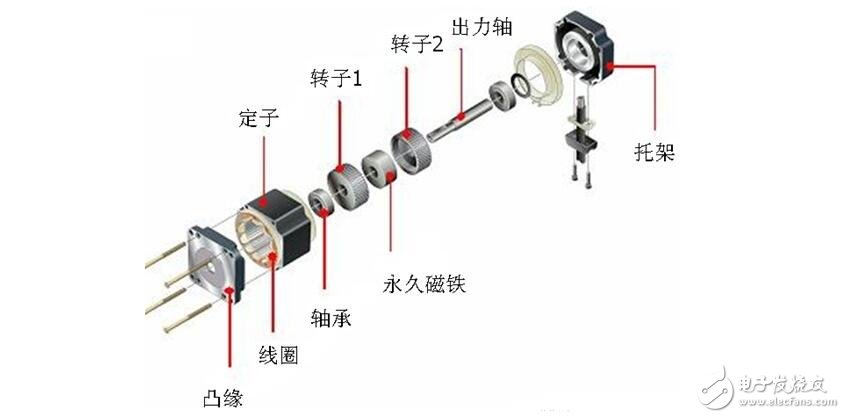
步進電動機構造上大致分為定子與轉子兩部分。 轉子由轉子 1、轉子 2、永久磁鋼等 3 部分構成。而且轉子朝軸方向已經磁化,轉子 1 為 N 極時,轉子 2 則為 S 極。
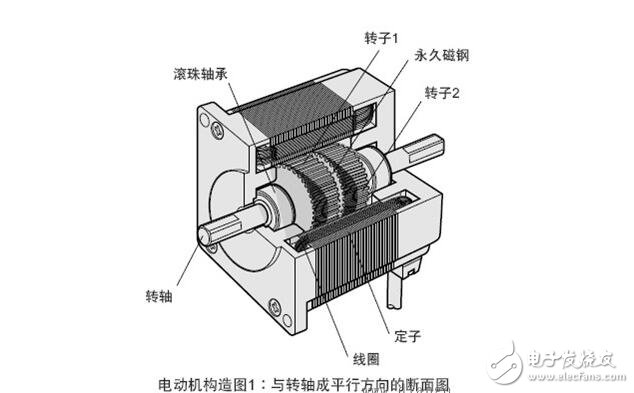
定子擁有小齒狀的磁極,共有 10個,皆繞有線圈。 其線圈的對角位置的磁極相互連接著,電流流通后,線圈即會被磁 化成同一極性。(例如某一線圈經由電流的流通后,對角線的磁極將 同化成 S 極或 N 極。) 對角線的 2個磁極形成 1個相,而由于有 A相至 E相等 5個相位,因此稱為 5 相步進電動機。
系統構成圖示
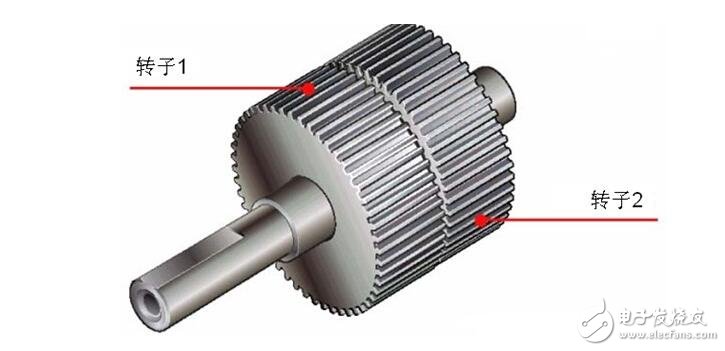
轉子的外圈由 50個小齒構成,轉子 1 和轉子 2 的小齒于構造上互 相錯開 1/2 螺距。由此轉子形成了100個小齒。目前已經有轉子單個加工至100齒的高分辨率型,那么高分辨率型的轉子就有200個小齒。因此其機械上就可以實現普通步進電機半步(普通步進電機半步需要電氣細分達到)的分辨率。
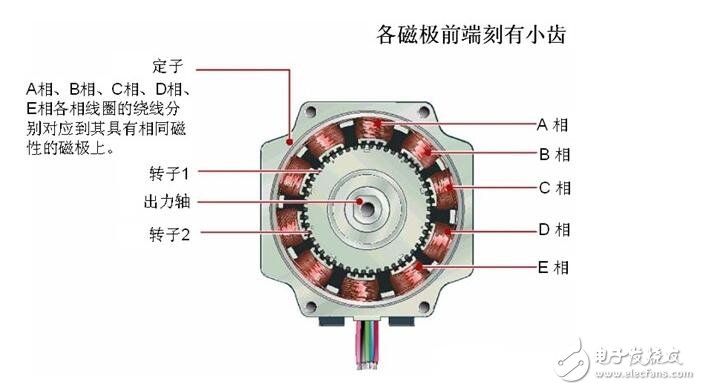
電動機構造圖2∶與轉軸成垂直方向的斷面圖
2、步進電機的運轉原理。
實際上經過磁化后的轉子及定子的小齒的位置關系,在此說明如下。 首先解釋勵磁,勵磁就是指電動機線圈通電時的狀態。
● A相勵磁
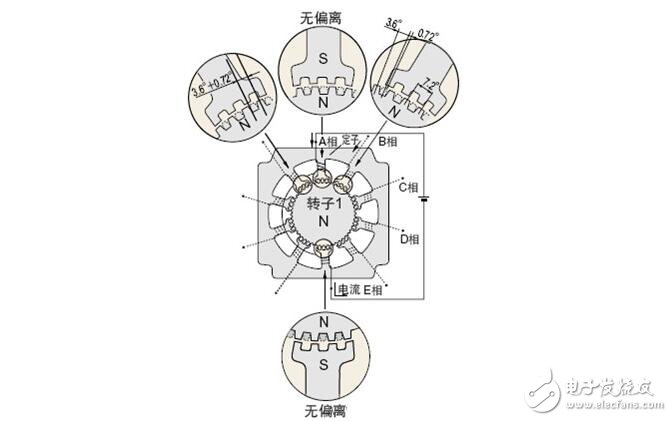
將 A 相勵磁,會使得磁極磁化成 S 極,而其將與帶有 N極磁性的 轉子 1 的小齒互相吸引,并與帶有S極磁性的轉子 2 的小齒相斥, 于平衡后停止。此時,沒有勵磁的 B相磁極的小齒和帶有 S極磁性 的轉子 2 的小齒互相偏離 0.72°。以上是 A 相勵磁時的定子和轉子小齒的位置關系。
● B相勵磁
其次由 A 相勵磁轉為 B 相勵磁時,B 相磁極磁化成 N 極,與擁有 S極磁性的轉子 2 互相吸引,而與擁有 N極磁性的轉子 1 相斥。
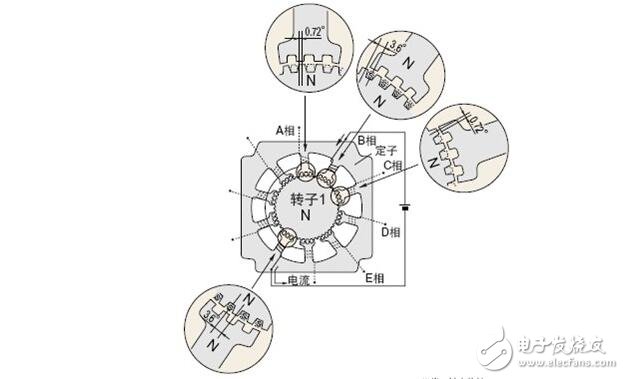
也就是說,從 A 相勵磁轉換至 B 相勵磁時,轉子轉動 0.72°。由此可知, 勵磁相位隨 A相→ B相→ C相→ D相→ E相→ A相依次轉換,則步進電動機以每次 0.72°做正確的轉動。同樣的,希望作反方向轉動時,只需將勵磁順序倒轉,依照 A相→ E相→ D相→ C相→ B相→ A相勵磁即可。
0.72°的高分辨率,是取決于定子和轉子構造上的機械偏移量,所以不需要編碼器等傳感器即可正確的定位。下圖就5相步進每次的位移量是0.72°進行更詳細的說明:
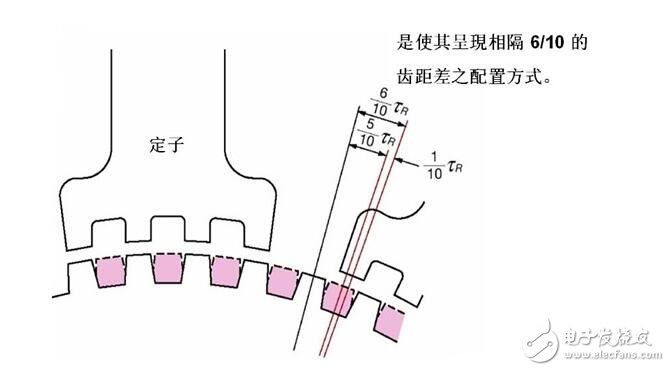
由于第一組定子正好與轉子相對應吸引。就勢必會導致第二組定子與對應的轉子相偏離(定子與轉子齒距一樣,但是各自所在的2個圓不一樣大)。而這個偏離值正好是齒距的十分之一。因此普通5相步進的步距角為:360°/50齒/10=0.72°
高分辨率5相步進的步距角為:360°/100齒/10=0.36°
另外,就停止精度而言, 會影響的只有定子與轉子的加工精度、組裝精度、及線圈的直流電阻的不同等而已,因此可獲得 ±3 分(無負載時)的高停止精度。 實際上步進電動機是由驅動器來進行勵磁相的轉換,而勵磁相的轉換時機則是由輸入驅動器的脈沖信號所進行。以上舉的是 1相位勵磁的例子,實際運轉時,為有效利用線圈同時進行 4相或 5相勵磁的。
3、步進電動機的特征
(1)運轉需要的三要素:控制器、驅動器、步進電動機
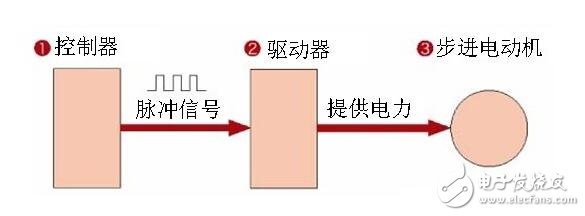
以上三部分是步進電機運轉必不可少的三部分。控制器又叫脈沖產生器,目前主要有plc、單片機、運動板卡等等。
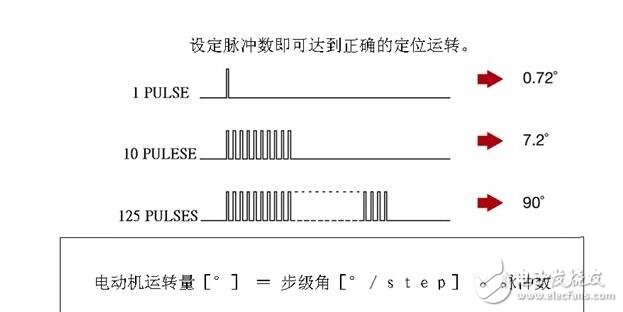
(2)運轉量與脈沖數的比例關系
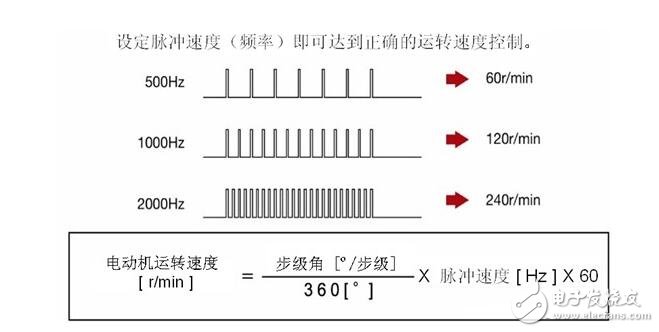
(3)運轉速度與脈沖速度的比例關系
(4)本身具有保持力
步進電機只有在通電狀況下,才具備自我保持力。在停電狀況下 ,自我保持力消失。
因此在升降設備傳動時,務必使用附電磁剎車型步進電機。
雖然步進電機已被廣泛地應用,但步進電機并不能像普通的直流電機,交流電機在常規下就能使用。它必須由脈沖信號、功率驅動電路等組成控制系統方可使用。因此用好步進電機卻非易事,它涉及到機械、電機、電子及計算機等許多專業知識。但是萬丈高樓平地起,從步進電機的基礎開始學習,無疑為將來的應用打好扎實的基礎。











評論