基于LIN總線的車燈控制系統

近幾年隨著LIN總線技術的出現,由于其成本低廉,且采用可有效保證通信負載的一主多從結構,在通信速率要求不太高的車身電子領域,可以部分替代低速CAN|0">CAN總線。筆者結合所研制的車燈LIN網,介紹了系統結構及硬件設計關鍵技術,以及相關應用協議的實現。
系統結構及硬件設計關鍵技術
● 系統結構
本系統包括一個主節點和四個從節點,主節點同時作為CAN-LIN網關,與車身CAN網連接。從節點為相應位置的車燈節點,節點間通過LIN總線連接,系統結構圖如圖1所示。主節點完成組合開關狀態的檢測,檢測到狀態變化時,主節點向從節點發送控制幀,從節點接收控制幀,完成對車燈負載的控制,同時監測過壓過流過溫情況的發生,并記錄其狀態。主節點周期性地發送查詢車燈ECU狀態的狀態幀,并得到ECU狀態。
● 關鍵技術
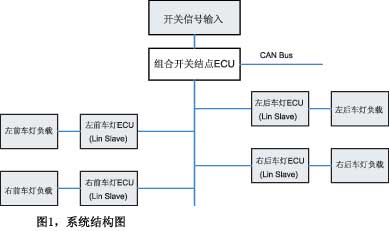 |
圖1系統結構圖 本文引用地址:http://www.104case.com/article/201706/350839.htm |
(1)開關檢測
組合開關信號的狀態檢測采用飛思卡爾的可編程多路開關檢測接口器件MC33993實現,該器件可以檢測多達22路開關量輸入,采用SPI方式與MCU進行狀態設置及開關狀態反饋,不僅實現對開關狀態的可靠實時檢測,同時提供“濕性電流”保護開關觸點,保證開關觸點的接觸完整性。
(2)車燈控制
車燈負載包括遠光燈、近光燈、小燈、霧燈和轉向燈,其控制采用飛思卡爾的智能功率器件MC33888和MC33984實現。這些器件不僅提供開關控制功能,還提供電流控制、限流、熱保護、過壓保護和先進的負載診斷。
(3)過壓保護
車燈負載不能很好地承受高電壓,過壓是導致車燈壽命變短的重要原因。車燈額定工作電壓為13.5V,實際上當提供18V以上電壓達幾秒,就會產生故障,可以采用PWM的方式控制車燈的有效電壓值。設車燈電阻為R,車燈兩端電壓為U,則在時間T內,消耗的熱量W=U2T/R
車燈電阻R為固定值,這樣車燈承受能量正比于電壓U的平方和工作時間T。可以通過PWM調節占空比d,從而調節有效工作時間T,這樣當電壓達到18V 時,調節占空比d到(13.5/18)2=56%,便能保證車燈的正常工作。在電路中通過檢測電壓值V,當電壓值V>13.5V時,按照如下公式計算占空比:
d=(13.5/V)2
這樣通過調節占空比,實現了對車燈工作電壓平均值的控制,有效保護了車燈負載。
LIN通信的實現
LIN網絡的實現包括協議驅動器和應用協議兩部分,協議驅動器完成通信功能,應用協議完成網絡管理和故障診斷。
● LIN通信概念
LIN協議是一主多從結構,通信只能由主節點中的主任務發起,一個完整的LIN報文幀的傳輸是由主任務和從任務共同實現的,主任務發送“報頭”,從任務發送或接收“響應”。
通信概念如圖2所示。
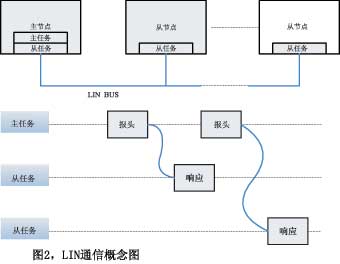 |
圖2LIN通信概念圖 |
● 協議驅動器
LIN基于SCI串行通信的格式,使得帶UART的MCU可以采用中斷服務程序,以狀態機的方式很容易實現其協議驅動器。根據LIN的通信概念,主節點的協議驅動器要實現報頭的發送、“響應”的處理,從節點的LIN協議驅動器要實現的是報頭的接收和解析、“響應”的處理。
● 應用協議
應用協議規范各節點之間的信息交互方式,定義通信規則,實現網絡管理和狀態管理。其制定比較復雜,需要綜合考慮汽車環境和網絡的安全性、實時性等因素。本文結合所研制的車燈控制系統,從信號及其組裝、幀的定義實現,進度表的制定的角度,初步探討基于LIN總線的應用協議的制定及實現。
(1)信號及其組裝
“信號”是“響應”的組成要素,信號的定義取決于系統的運行特點和控制對象的特性,在本車燈LIN網內,需要定義的有車燈控制信號、車燈狀態信號和車燈選擇對象信號。以布爾信號的形式定義車燈控制信號和狀態信號,以單字節信號的形式定義車燈選擇對象。
|
表1車燈選擇信號 |
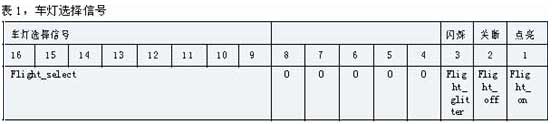
車燈控制信號包括車燈點亮信號Flight_on、車燈關斷信號Flight_off、車燈閃爍信號Flight_glitter。通過對車燈進行數字編號的方式,定義了車燈選擇信號Flight_select。將之按照在“響應”中的位置(以位為單位)組裝為如下的方式,在控制幀內傳輸。
每路車燈負載對應一布爾信號,表示該路是否出現故障(過溫、過壓、過電流、負載開路),各車燈ECU將相關信號組裝起來,在各自的狀態幀中傳輸。
(2)幀的定義及實現
根據LIN協議,幀包括無條件幀、事件觸發幀、零星幀三種。以無條件幀的形式定義控制幀和狀態幀,由于車燈的控制規律,左右燈要同時打開,所以左前車燈 ECU和右前車燈ECU共用一個前燈控制幀,左后車燈ECU和右后車燈ECU共用一個后燈控制幀,針對4個車燈節點,相應定義了4個狀態幀,用于反饋當前控制對象的工作狀態,即是否有過壓、過流、過溫情況發生。
對無條件幀而言,只要時間槽輪轉到該無條件幀,便要在總線上完整地傳輸。而零星幀的傳輸取決于所關聯的無條件幀內信號的更新情況,只有在信號被更新的情況下,才傳輸所關聯的最高優先級的無條件幀,然后在下個時間槽再次輪轉到該零星幀時,再傳輸低優先級的無條件幀,否則該時間槽內總線保持靜默。考慮到汽車環境對各個ECU的低功耗要求很高,且組合開關的操作是偶爾且即時的,所以以零星幀填充進度表,這樣在大部分時間內,開關狀態不會產生變化,即所關聯的控制幀中信號不會被更新,當時間槽輪轉到零星幀時,總線保持靜默,超過4秒沒有總線信號,主從節點便可以進入休眠狀態,滿足低功耗要求。表2給出了零星幀和所關聯控制幀的說明。
 |
表2零星幀和所關聯控制幀的說明 |
(3)進度表的制定
LIN總線的進度表定義了幀在網絡中傳輸的次序,以及幀間的時間間隔,保證了LIN總線不會過載,同時保證了關鍵信號的周期性和實時性。
根據該LIN網的特點,定義了三個進度表:Normal_table、Status_table、Trigger_table,主節點根據當前LIN網的狀態切換進度表。 Normal_table由零星幀填充,是主節點的主要進度表,這樣可以在組合開關沒有動作的情況下讓LIN集群處于休眠狀態,休眠指令按照LIN幀的形式發送,采用數據場第一個字節為0x00的診斷幀實現。Status_table中包含對應于四個車燈節點的四個狀態幀,Trigger_table中包含關聯于四個無條件狀態幀的事件觸發幀。由于各個車燈ECU可以對過流、過壓、過溫進行保護,且有保持車燈電壓的功能,所以主節點可以以較長的周期把進度表切換到Trigger_table,查詢相應節點的狀態,當從節點有相應信號被更新時,主節點將進度表切換到Status_table,得到相應節點的狀態,優先級為左前車燈ECU>左后車燈ECU>右前車燈ECU>右后車燈ECU。
具體細節如下。當時間槽輪轉到零星幀control時,如果開關狀態沒有改變,即所關聯的控制幀中信號沒有被更新,該時間槽內總線保持靜默,如果有一個控制幀的信號被更新,該時間槽內便會發送該無條件控制幀,如果在無條件控制幀中有多于一個信號被更新,主節點對這些控制幀做出“pending”標志,然后在該時間槽內發送最高優先級(優先級在零星幀中定義)的無條件控制幀,當進度表輪轉到下一個該零星幀的時間槽時,“pending”狀態的候選幀便會被發送。
主節點以1秒鐘的間隔把進度表切換到Trigger_table,當時間槽輪轉到事件觸發幀status,如果在該幀數據場的第一個字節沒有得到任何數據,即所關聯的無條件狀態幀沒有狀態信號被更新,總線在“響應場”內保持靜默,如果收到一個所關聯的無條件狀態幀的ID,后續得到的數據即該無條件狀態幀中被更新的“信號”,如果得到一個無法匹配的ID,便認為總線沖突,即同時有至少兩個所關聯幀中的信號被更新,這時,主節點要在該進度表下一個時間槽開始時切換進度表到Status_table,然后輪詢各個狀態幀,輪詢結束后進度表再切換回主進度表Normal_table。
結束語
本文結合所研制的車燈控制系統,介紹了系統結構及硬件設計關鍵技術,從制定和實現LIN協議驅動器和應用協議的兩個方面論述了LIN通信,實現了車燈控制和診斷。
參考文獻
[1] 鄭榮良,袁鵬平.局域互聯網絡LIN總線在車輛上的應用.江蘇大學學報.2004,2
[2] 李暉,曾潔,郭永偉.基于MC33993的鍵盤控制接口電路設計.微電子技術. 2004,3
[3] 劉曉明,高青春,熊東.基于CAN/LIN總線的汽車通信網絡設計.微機發展.2005,8
[4] 侯樹梅,張云龍,蘇劍.一種新型汽車車身低端通信總線LIN.汽車技術.2003,11
[5] 張翔,湯孫壽,曾虹.LIN總線在汽車車身控制中的應用.杭州電子科技大學學報.200,6









評論