鋰離子電池管理芯片的研究及其低功耗設計 — 鋰離子電池管理芯片的功能設計及功耗優化(二)

3.3鋰離子電池管理芯片的功耗優化
本文引用地址:http://www.104case.com/article/201706/348226.htm從上面的分析可以看出,此芯片是一個連續工作的數模混合系統,同時又以被監測的鋰離子電池為供電電源,因此必須能夠在電池電壓的整個變化范圍內正常工作。在實現電路功能并滿足檢測精度的前提下,為了盡可能延長電池壽命,降低電路功耗成了另外一個重要的設計指標。由于控制邏輯部分屬于數字電路,其靜態功耗幾乎可以忽略,所以在優化邏輯電路動態功耗的前提下,如何降低模擬電路的靜態功耗并且限制低電壓下系統功耗成了設計重點。
3.3.1 DPM技術在數模混合信號系統中,同樣可以采用數字電路的DPM技術來進行功耗優化。即根據負載和任務的變化,及時關掉暫時不工作、也不影響整個系統輸出的電路部分,從而減小系統功耗。和傳統DPM理論相比,混合信號電路中的控制對象不再是數字電路而是模擬電路,這樣也能夠更有效地節省系統靜態功耗。然而,目前的DPM理論還大多數集中在純數字電路系統、或是多媒體、無線通信領域。面向電池管理芯片的混合信號電路DPM理論還未見報道。
一般地,系統受外界負載信號的激勵做出響應,為了響應任務而需要消耗能量。由于負載信號的到來相互間沒有聯系,沒有任何特征,一般也不遵從一定的概率分布。在不能預知負載特性的情況下,系統必須能檢測并且判斷負載性質,根據合理的DPM策略來決定系統內部模塊的工作狀態。因此,可以先從功耗管理器(Power Manager, PM)的系統抽象結構入手,再進一步研究管理器的內部組成及實現。
1 PM抽象結構
按照相應功耗管理實現的物理層次,可以分為內部PM和外部PM兩類。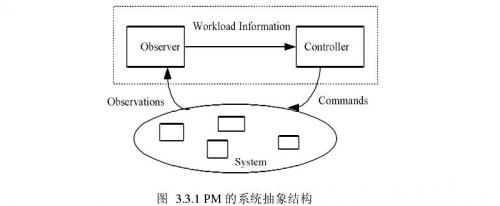
圖3.3.1給出了外部功耗管理結構。圖中,在原有工作系統外部,增加了功耗管理部分(虛線框中所示),其中,檢測電路(Observer)收集負載信息,控制器(Controller)產生強制功耗狀態變化的控制信號。控制器可以是一個可編程的微控制器,或者是一個狀態機,它既可以位于內部邏輯中,有時也可以作為一個單獨的微處理器存在。圖3.3.1所示的外部PM一般由軟件實現,由于它能對系統和負載進行準確的實時檢測,所以可以采用較復雜的功耗管理策略,功耗優化效果較佳,常用于較為復雜的系統如嵌入式系統。外部PM的缺點是速度較慢,增加了外部與系統之間接口的設計復雜程度,軟硬件綜合代價未必最佳。內部管理器則一般由系統內部硬件實現,因此功耗管理速度較快,對外接口簡單,但是在檢測整個系統的工作狀態時有一定的局限性,通常只能采用較為簡單的DPM策略。
DPM工作流程圖如圖3.3.2所示。從圖中可以清楚地看到,當系統啟動后,由檢測電路來檢測系統負載的狀態和性質,然后根據不同的策略估算功耗狀態,如果不需要關斷模塊則繼續檢測負載,如果需要功耗管理,則由控制器產生用于關斷相應模塊的控制信號。
綜上所述,一個DPM體系的選擇和實現,顯然首先需要建立系統功耗或者性能以及負載的模型,然后再根據相應的判決策略產生控制信號。下面,就將從PM實現的層次,從功耗建模、判決策略、體系實現這三個方面分別討論。
2功耗建模
功耗建模可以借鑒DPM中實時嵌入式系統的建模方法,將電池管理芯片定義為普通的功耗管理系統。這個系統由一系列相互影響的受功耗管理器控制的功耗管理組件(Power Management Component, PMC)組成。這種定義是普遍意義上的,在系統級層次,PMC可以是芯片中的一個系統功能模塊。為了實現更有效的DPM策略,并不需要了解PMC內部結構,只需要關心它們與外界如何相互作用。這種方法將有助于更好地理解PM和PMC之間需要交換怎樣的信息。
在設計時,非功耗管理組件的目標僅是在特定的功耗預算下實現性能,而PMC才可以在高性能高功耗和低性能低功耗之間自由地轉換,從而達到功耗與性能的折衷。
PMC的一個基本特征是,它有多種功耗模式,且各種模式之間的轉換也可能引起延遲或性能下降。模式數量增多雖然可以更精確地控制PMC的狀態,使浪費的功耗最小,性能調整達到最佳,但在實際應用中為了不使設計難度過大,以及實現PM的硬件代價過大,一般都要選擇適當的PMC功耗模式數。
PMC模型可以由功耗狀態機(Power State Machine, PSM)來描述,PSM中的狀態即是PMC各種工作模式,模式之間的轉換有功耗或延遲。為簡化模型,電池管理芯片的PMC的功耗狀態可由圖3.3.3所示的PSM表征。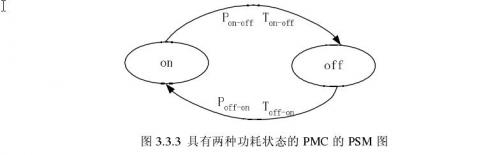
圖3.3.3所示的PMC可以有兩種狀態:一種是ON,此時PMC正常工作,功率消耗正常;另一種是OFF,PMC被關斷,功耗較低。功耗狀態的轉變通常是要以犧牲性能和功耗為代價的。比如,如果進入低功耗狀態需要關斷供電電源,那么從低功耗狀態恢復則通常需要一定的時間,這個延時要用來使電源電壓/時鐘穩定,或重新初始化系統,或者進行狀態的重新存儲。簡而言之,需要有一定的策略來決定PMC何時、是否值得進入低功耗狀態;在復雜的多種功耗狀態系統中,則還要選擇進入何種低功耗狀態。
需要指出的是,系統及內部組件的模型都可以由PSM來描述,但是負載的模型變化相對復雜,比如將從Timeout策略中的簡單假設變化到復雜的隨機模型。
但是無論是哪種情況,在高效的功耗管理策略中,都離不開負載的信息。
3功耗管理策略
從上面的分析可以看出:首先,功耗優化是基于性能約束條件下的功耗優化,反之也成立;其次,一個有效的功耗管理方案取決于系統和負載的特性。目前,已有的DPM技術和優化策略可以分為非適應性和適應性的兩大類。其中,非適應性的DPM技術以基于Timeout策略的為代表,而后者以基于預估算策略、隨機控制策略的為代表。
1)Timeout策略
DPM判決策略中,Timeout策略是空閑狀態在等待一段時t timeout后關閉。其算法表述如下:
Timeout PM ()
{
Begin
Initiate ttimeout
If tidle > ttimeout then shutdown
Stay in sleep until request!=0
End
}
Timeout策略中,假定Pr是退出低功耗狀態所消耗的功率,tr是相應延遲,則E r =Prtr是退出低功耗的能量,Pi是處于空閑狀態時的功率,則定義一個空閑等待時間閾值ttimeout
顯然,當等待時間超過閾值時,進入低功耗狀態能節約更多的能量。該策略的思路比較簡單,當進入空閑的同時開始計時,在閾值時間ttimeout之前不關閉,到達閾值后才關閉PMC進入低功耗狀態,直到接收到外界輸入的任務后再返回工作狀態。
由此看出,Timeout策略有比較鮮明的特點:首先,時間閾值ttimeout非常重要,合理的設置閾值將顯著提高關斷的正確性,假設的可信度甚至可達95%.此外,和基于預測和基于隨機控制的策略相比,Timeout策略的應用相對簡單。基于預測的策略是通過學習任務的分布,在輸入特性和系統性能的基礎上動態地改變閾值,即是通過預測來消除負載的不確定性。基于預測的策略中,如果參數較多,則將增大調整的難度,而且它不能很好地控制系統性能的損失。基于隨機控制的策略是將PM看作是一系列隨機最優化問題,所涉及的系統一般有多種功耗狀態而不僅僅兩種狀態的轉換。在較為復雜的多媒體、無信通信領域,上述兩種策略雖然增加了系統的軟硬件或性能的代價,但是和節省的功耗相比還是值得的。但在單芯片系統中,受成本和性能的限制,由于Timeout策略比較容易實現,用內部PM實現時所增加的軟硬件負擔相對不大,而且功耗節省明顯,因此比較受到重視。本文研究的電池管理芯片是一個實時系統,保護功能的實現依賴于對供電電池狀態的檢測,采用基于Timeout的策略進行功耗管理,從成本、代價以及可行性方面,都是一個比較好的選擇。
但是,Timeout策略有以下缺點:一是關斷與否與負載的性質和狀態無關,而僅僅根據任務請求來決定,這顯然不能滿足鋰離子電池管理芯片的應用要求;二是在等待激發Timeout策略的過程中,仍然有較大的功率消耗,如果能采用預關斷策略,即在系統已經歷的時間和負載性質確定的基礎上,在等待開始時就關閉,這樣就可以節省等待期間的功耗。針對上述Timeout策略的缺點,本文提出了一種基于負載驅動的預關斷Timeout策略。
2)基于負載驅動的預關斷Timeout策略
一般地,根據負載性質,假定PMC有L種功耗狀態,其中L是對應完全工作狀態,1,…,L-1是不同的睡眠狀態,則Pl(l=1,…,L-1)是對應不同狀態的功耗,從l(l=1,…,L)到m(m=1,…,L,m≠l)不同狀態之間轉換將有能量和延遲的代價,分別是功耗Ptl,m和延遲tl,m 。為分析簡便,在狀態變化為從l(l=2,…,L)到m(m﹤1),功耗和延遲都很低,可以忽略不計。
再定義一個參數Zl(l=1,…,L-1),它是為了獲得正的能量必須維持在l狀態的時間,則有
式中,等式左項代表的是維持在l狀態比在l+1狀態時,能夠節省的能量值,右項表示從l到L以及l+1到L的狀態轉變間的差值,因此有
前面已提出,結合應用要求和功耗管理成本,規定電池管理芯片的PMC,只有兩種功耗狀態,因此有L=2,其中l=1代表關狀態,l=2代表開狀態。當l=1時,式(3.3.3)變為
可以用式(3.3.4)描述常規的Timeout策略:當空閑時間t idle比空閑等待時間閾值t 1長時,此策略便假定,在t 1 +Z 1時間段內仍有可能保持空閑,此時關斷顯然可以節省功耗。而事實上,在能夠檢測到負載特性的基礎上,對于可以處于空閑狀態而不影響輸出狀態的部分電路,只要滿足tidle> Z1,就可以在空閑等待開始便被關斷。
可以從負載、器件和功耗狀態的角度,分析比較常見的Timeout策略和基于負載驅動的預關斷Timeout策略,結果如圖3.3.4所示。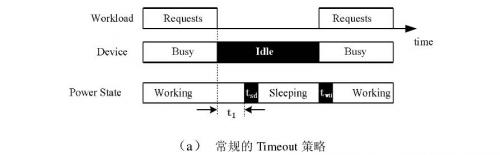
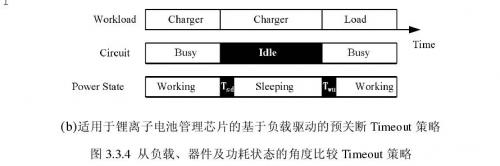
圖3.3.4(a)中,t 1為等待閾值時間值,Tsd和Twu是狀態轉變對應的延遲,功耗狀態的轉換只是根據任務請求;圖3.3.4(b)所示的Timeout策略中,功耗狀態的轉換是基于負載性質和電路狀態的判別,所以可以在等待開始時就關斷相應電路,此時系統代價僅是功耗轉換之間的延遲。顯然,和常規策略相比,基于負載驅動的預關斷Timeout策略可以節省更多的功耗。
4 DPM技術實現框圖如前所述,假設電池管理芯片的PMC具有兩種功耗狀態,系統的PSM就可以如圖3.3.5所示。系統有三種功耗狀態:一是所有功能模塊都正常工作的狀態,所消耗功率為正常(Normal),二是根據負載特性動態地關閉部分功耗較大的功能模塊,即較低功耗狀態(Partly Shutdown)最后是將系統電源及時切斷,最低功耗狀態也就是Power Down模式。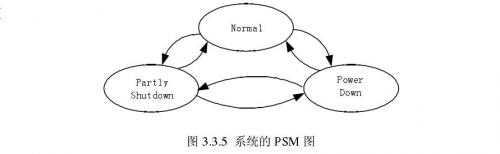
為了實現圖3.3.5所示的系統PSM,在原系統框架的基礎上,本文設計了一個內部PM,并且采用基于負載的預關斷Timeout功耗管理策略優化功耗,如圖3.3.6所示。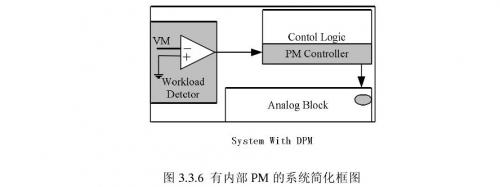
從外部和內部PM的分析比較可以看出,在能夠準確地檢測出負載性質和系統狀態的前提下,鋰離子電池管理芯片采用內部PM,將能夠以較小的硬件代價實現快速、靈活的動態功耗管理。圖3.3.6中的PM由負載檢測電路、PM控制器組成。其中,控制器是一個狀態機,為了盡量減小系統PM控制電路的代價,將其置于系統原有的邏輯電路中,這樣也能保證不影響系統其它功能。
PM具體的工作過程如下:利用檢測充放電電流的VM端,設計一個比較器,根據VM端電壓極性來判斷所接負載特性,內部功耗控制邏輯電路接收比較器輸出信號后,則輸出相應的控制信號,然后將此時系統中電流消耗較大,但又可以處于空閑狀態的模擬電路關斷。在內部PM中,所有模擬電路的關斷都可以由一個MOS開關管控制,DPM信號由控制器輸出,控制開關管的導通,從而在需要時能切斷電路與電源或到地的通路。
鋰離子電池管理芯片的DPM工作流程見圖3.3.7.在圖3.3.7(a)中,利用系統檢測模塊實時監測負載,并判斷負載是放電負載還是充電器。接負載放電時,如果電池處于過充電狀態,則不啟動DPM,所有功能模塊都正常工作;如果電池不是過充電,則將充電電壓取樣電路關閉,換句話說,此時系統將對過充電狀態的實時檢測以節省功耗:如果所接的是充電器,則同樣需要預先判斷是否過放,是過放狀態則不啟動DPM,否則將過放電電壓取樣電路關閉,此時系統不再認為電池還會處于過放狀態。圖3.3.7(b)則是利用電池在過放狀態下,根據VM與VDD間的壓降決定是否進入Power Down狀態,即關閉系統電源以維持極低的電流消耗。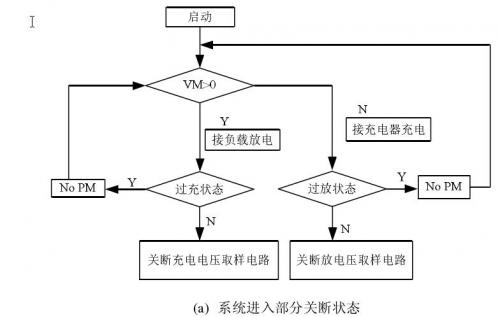
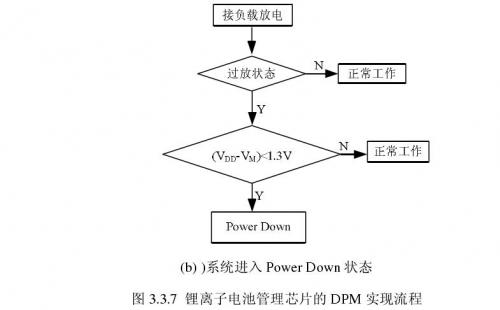
從流程圖中還可以看出,正是基于負載的預關斷Timeout策略,鋰離子電池管理芯片的DPM實現對于不同的負載是有差別的:在負載為充電器時,經過放電檢測延時時間tDL后,系統決定是否采用功耗管理;而所接負載是充電器時,則要在過充電檢測延時時間tCU后,再決定是否可以預關斷。這種差別產生的本質在于,面向鋰電池管理芯片的這種Timeout策略不僅需要對負載做出判別,還要利用系統的工作狀態,選擇需要功耗管理的相應模塊。
3.3.2電路級的功耗優化1亞閾值電路的優缺點正如第二章所指出,在現有的模擬電路低功耗技術中,亞閾值電路有著特殊的地位和作用,在一些對速度要求不是很高的低功耗場合,亞閾值電路是一種較好的選擇。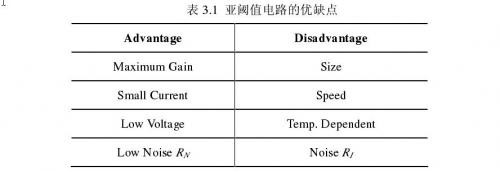
表3.1列舉了亞閾值電路的優缺點。在給定的電源電壓范圍下,亞閾值MOS管的飽和電壓約為100mV,這將大大提高電路的動態范圍,也說明在低電壓下電路仍有較好的動態特性;低的漏電流也增加了它在低電流功耗系統中的優越性。此外在高頻時,RN正比于1/gm,而亞閾值區的gm/ID最大,所以此時噪聲最小;在低頻時,閃爍噪聲占主要地位,而且RN與ID無關,因此在同樣的ID下,亞閾值MOS管較高的W/L也意味著更低的RN。
另外,亞閾值MOS管的柵極傳輸特性具有斜率因子為n的指數關系。源極傳輸特性與雙極晶體管相同,并且其特性可以用柵壓來調節,所以在有些情況下,可以用MOS管代替實現類似雙極晶體管所能實現的功能。
2電路設計中的控制和判斷
從電路設計角度,不僅需要控制及判斷MOS管的工作區域,還需要掌握各工作區域的特征參數,下面分別進行討論。
對于MOS管,其工作區域主要有線性區(可變電阻區)、飽和區和亞閾值區,根據MOS管在模擬電路中的功能不同,其工作區域的設定顯得尤為重要。通常情況下,如恒流源電路等,MOS管工作在飽和區;在個別情況下,MOS管工作在線性區,主要當作電阻使用,特別是大電阻,其明顯的優點是占用較小的版圖面積,而且相對來講,比電阻的工藝漂移小;此外,對于MOS工作在亞閾值區的情況,在功耗要求特別低的場合,將能解決實際問題。對MOS管的工作區域設定應滿足以下要求:
①若要求MOS管工作在飽和區,理論上要保證VGS>VTH及VDS≥VGS -VTH;
②若要求MOS管工作在線性區,要保證VGS>VTH及0﹤VGS﹤VGS-VTH;
③若要求MOS工作在亞閾區,則要保證柵壓滿足0﹤VGS﹤VTH
但在實際應用時,當V GS與V TH值相差不大時,MOS管將工作在亞閾值區與強反型區的過渡狀態,嚴重影響電路的性能。將電路的工作狀態分為弱反型、中等反型和強反型,各個狀態之間的界限可根據電壓或電流來估計,其方法描述如下:
①電壓估計法
a)當VGS〉VTH+100mV,為強反型;
b)當VTH +100mV>VGS>VTH -100mV,為中等反型;
c)當VGS﹤VTH-100mV為弱反型;
②電流估計法
a)當ID〉10IS
b)當10IS>ID>0.1IS,為中等反型;
c)當ID﹤0.1IS,為弱反型
其中,IS被稱為中等反型特征電流,其表達式如下:
對于W/L=1的NMOS管,I S的典型值從100nA到500nA之間;對于W/L=1的PMOS管,IS的典型值從40nA到120nA之間。對本設計所使用的工藝,可以計算出寬長比為10u/10u時,P管的亞閾值特征電流I SP約為120nA,N管的特征電流I SN約為230nA.涉及弱反型MOS管的特征參數還有:
①輸出電阻考慮溝道長度效應的傳統方法是在漏電流方程后乘上(1+VDS /VA),因此
VA為弱反型的歐拉電壓。因此,弱反型 MOS 管的輸出電阻為
對于給定尺寸的器件,當工作區域從強反型變化到弱反型時,漏電流將下降,對應輸出電阻將增加。
②跨導gm
由弱反型MOS管的漏電流方程,很容易推出其跨導為
③體跨導gmb
體跨導的定義為
通常gmb被表示成gm的一部分,即
對于VSB很小時
在弱反型區有
由于k隨著VSB增大而增大,一個較為合理的取值為:
3.4小結
本章從系統層次,討論了鋰離子電池管理芯片中的功能設計和功耗優化。
針對鋰離子電池管理芯片的應用特點,分析了系統設計中的重點及難點。提出了實時完整的保護功能設計目標后,給出了系統框圖。
功耗優化是鋰離子電池管理芯片的一個重要目標。混合信號芯片中,DPM技術同樣可以由三要素構成:功耗模型、判決策略及電路實現。本章在系統組件的功耗模型基礎上,給出了系統的功耗狀態機圖。確定判決策略時,雖然基于預估算和隨機控制的策略在一定程度上,能更好地根據負載變化控制系統功耗,但是所增加的軟硬件成本使得它們更適用在實時嵌入式系統中;對于單芯片系統,基于Timeout的策略簡單有效,所增加的硬件成本有限而有更大的應用前景,但是由于傳統的Timeout策略不涉及負載性質,對功耗優化有很大的不確定性,而且在等待期間的功耗也不容忽視,所以本文提出了基于負載的預關斷Timeout策略。然后,本章還給出了系統級DPM實現框圖,并提出了能實現兩級功耗管理的DPM工作流程,具體的電路將在下一章給出。
此外,基于亞閾值電路在低電流消耗場合的綜合表現,對工作在亞閾值區的MOS管作了進一步的分析討論,并提出了設計中工作狀態的判斷標準及控制方法。
本章是后面低功耗電路實現及驗證的功能設計目標和功耗管理基礎。

評論