基于FPGA的組合導航系統

項目背景及可行性分析
本文引用地址:http://www.104case.com/article/201706/347321.htm1.項目名稱、項目的主要內容及目前的進展情況
項目的主要內容及目前的進展情況:本項目主要研究基于MicoBlaze導航處理器的組合導航的作用原理及其實現。目前已經完成大部分軟件程序的編制,現已完成外圍電路模塊的研制工作。
2.項目關鍵技術及創新點的論述;
(1) 采用低成本MEMS加速度計和陀螺儀設計慣導單元。
(2) 引入3軸磁阻傳感器解決慣導單元的初始對準問題。
(3) 采用GPS+IMU+COMPASS的結構來設計自主導航系統。
(4) 多傳感器冗余技術,滿足多種需要。
(5) 采用氣壓計獲得高度信息。
(6) 基于MEMS慣性器件的初始對準。
(7) 采用Labview設計系統演示界面。
3.技術成熟性和可靠性論述:
微型慣性傳感器與傳統的慣性傳感器相比,具有體積小,重量輕,成本低,功耗低,可靠性高和壽命長等優勢。在車輛導航和控制,機器人,無人機導航,武器制導等領域有著廣闊的應用前景。然而目前其精度還比較低,導致其應用受到一定的限制。GPS接收機與微型慣性測量單元的結合可以取長補短,大大提高輸出數據更新率,防止導航定位誤差隨時間積累,并且提高了可靠性和抗干擾能力,為低成本,輕小型導航與制導系統提供了一個非常有吸引力的方案,成為設計者的最佳選擇,也是目前導航定位技術發展的主要方向之一。
目前購買一套國外的低成本的組合導航裝置的價錢也在10萬元以上,為了降低成本使導航裝置更加符合車輛等民用場合的導航。我們采用ADI的低成本的加速度計和陀螺儀利用PowerPc處理器設計了一個完備的導航系統。
項目實施方案
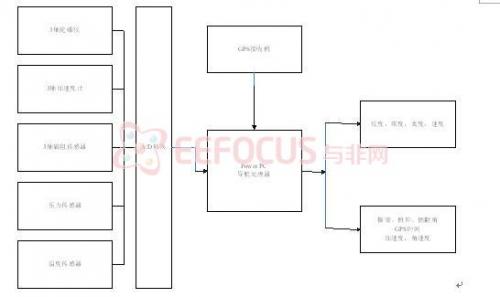
1.方案基本功能框圖及描述
2.需要的開發平臺
經過詳細的分析論證本方案采用Spartan-3E開發平臺進行設計完全可以滿足系統的需求。
3.方案實施過程中需要開發的模塊
本方案中需要研制慣性導航單元,主要包括電子羅盤模塊,壓力計模塊,加速度模塊,陀螺儀模塊和溫度模塊。以上模塊都采用自己購買相應元器件進行開發的方式進行。
4.系統最終要達到的性能指標
論述本項目最終完成時所設想達到的目標。
本方案最終要達到一下目標
精確而實時位置坐標。
不受動態學影響的高精度航向角。
經氣壓高度表校正后的精確海拔高度。
精確的沿著3個軸向的速率和加速度。
精確的3個軸向角速度。
需要的其它資源
1.設計輸入輸出功能子板
子版采用SPI接口與主板通信,輸出口采用主板上的串行口進行輸出。
2.測試設備
測試設備目前僅有萬用表、示波器這兩個設備。
3.方針、開發工具
ISE,Embedded Development Kit (EDK) and Platform Studio,modsim。








評論