載波移相多電平PWM研究

1 引言
本文引用地址:http://www.104case.com/article/201706/347157.htm隨著電力電子技術(shù)和電力半導(dǎo)體技術(shù)的迅速發(fā)展,中壓大功率傳動設(shè)備不僅提高了資源的利用率,同時還降低了生產(chǎn)的成本,雖然其電路的拓?fù)浣Y(jié)構(gòu)和控制技術(shù)已經(jīng)比較成熟,但多電平技術(shù)的研究仍備受大家的關(guān)注。多電平技術(shù)避免了器件的直接串聯(lián),具有輸出電壓高,諧波含量低,電壓變化率小,開關(guān)頻率低等優(yōu)點。多電平技術(shù)實現(xiàn)的關(guān)鍵在于如何實現(xiàn)大量的SPWM控制信號。
SPWM法是一種比較成熟的,目前使用較廣泛的PWM法。前面提到的采樣控制理論中的一個重要結(jié)論:沖量相等而形狀不同的窄脈沖加在具有慣性的環(huán)節(jié)上時,其效果基本相同。SPWM法就是以該結(jié)論為理論基礎(chǔ),用脈沖寬度按正弦規(guī)律變化而和正弦波等效的PWM波形即SPWM波形控制逆變電路中開關(guān)器件的通斷,使其輸出的脈沖電壓的面積與所希望輸出的正弦波在相應(yīng)區(qū)間內(nèi)的面積相等,通過改變調(diào)制波的頻率和幅值則可調(diào)節(jié)逆變電路輸出電壓的頻率和幅值。
2 總體設(shè)計方案
2.1單元串聯(lián)多電平變頻器拓?fù)浣Y(jié)構(gòu)介紹
單元串聯(lián)多電平變頻器的拓?fù)浣Y(jié)構(gòu)簡單,易于模塊化,可以根據(jù)系統(tǒng)對輸出電壓、電平數(shù)的要求確定功率單元的級數(shù)。如圖1所示,七電平H橋串聯(lián)逆變器拓?fù)浣Y(jié)構(gòu)圖,其單相電壓是由三個功率單元組成,每個功率單元均為H橋逆變電路結(jié)構(gòu),輸出端依次串聯(lián)在一起,并利用SPWM信號控制功率單元中開關(guān)器件的通與斷。
2.2載波移相控制理論
一般來說,N電平的逆變器調(diào)制,需要N-1個三角載波。移相載波調(diào)制法中,所有三角波均具有相同的頻率和幅值,但是任意兩個相鄰載波的相位要有一定的相移,其值為
 (1)
(1)
通過調(diào)制波和載波的比較,可以產(chǎn)生所需要的開關(guān)器件的驅(qū)動信號。
但在數(shù)字化實現(xiàn)中,載波移相法一般不是由一個調(diào)制波和一組經(jīng)過相移的載波比較生成,而是由調(diào)制波和一個載波進(jìn)行比較之后,再進(jìn)行一定的延時得到各個功率單元的SPWM控制信號。
采用DSP+CPLD來完成多路SPWM控制信號的實現(xiàn)。其中由DSP控制器實現(xiàn)單相電壓中的第一級功率單元兩橋臂控制信號,并由CPLD來實現(xiàn)對這兩路控制信號的移相延時,進(jìn)而實現(xiàn)單相電壓中各個功率單元的SPWM控制信號。系統(tǒng)原理框圖如下圖2所示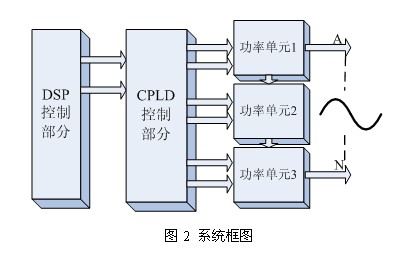
3 DSP控制部分
DSP控制部分主要任務(wù)是實現(xiàn)單相電壓中第一級功率單元的兩路控制信號。如圖3所示,這兩路控制信號分別控制左橋臂Q1和右橋臂Q3兩開關(guān)器件的通與斷,Q2和Q4控制信號分別為Q1和Q3信號的互補(bǔ)信號,Q1和Q2、Q3和Q4信號間需要增加一定的死區(qū)延時時間。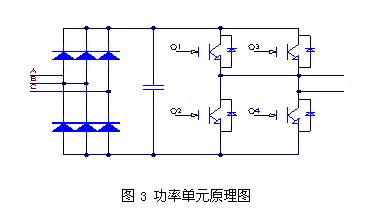
功率單元左橋臂Q1的控制信號當(dāng)參考波大于載波時,輸出高電平,Q1導(dǎo)通,Q2截止;反之,輸出低電平,Q1截止,Q2導(dǎo)通。Q1信號取反后得到Q2信號。左橋臂Q3的控制信號由互差180的三角載波與參考波比較得到,當(dāng)參考波大于載波時,輸出高電平,Q3導(dǎo)通,Q4截止;反之,輸出低電平,Q3截止,Q4導(dǎo)通。Q3信號取反后得到Q4信號。載波與參考波的比較過程參考圖4,兩橋臂控制信號的實測波形如圖5。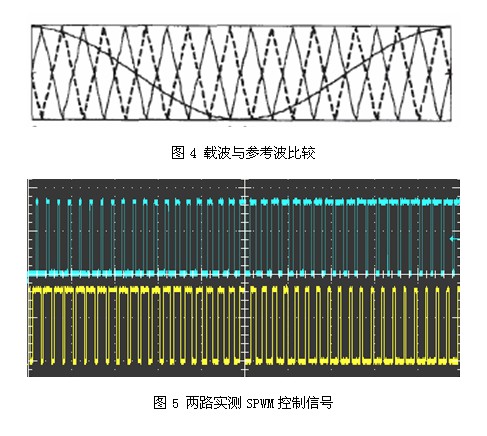
對以上內(nèi)容的分析,在本系統(tǒng)中采用了DSP TMS320F2812作為該部分的控制核心其內(nèi)核為32位,運行速度可以達(dá)到150MIPS,同時其有6路獨立的PWM輸出、2個異步串行通訊口、16通道12位AD輸入,內(nèi)置了36K的RAM和256K的Flash存儲器,在主控制電路中,只需要在該DSP的基礎(chǔ)上配合一些簡單的外圍電路即可實現(xiàn)所需的6路SPWM控制信號。
4 CPLD控制部分
CPLD控制部分主要任務(wù)是對第一級功率單元H橋左、右橋臂控制信號進(jìn)行移相,進(jìn)而得到以后各級功率單元的左、右橋臂的控制信號。該部分設(shè)計的關(guān)鍵是信號的邊沿檢測和移相延時兩部分。如下圖6所示,首先,CPLD對SPWM進(jìn)行邊沿信號檢測,當(dāng)檢測到上升沿(或下降沿)到來后,再進(jìn)行Td時間的延時,最后輸出置1(或0)。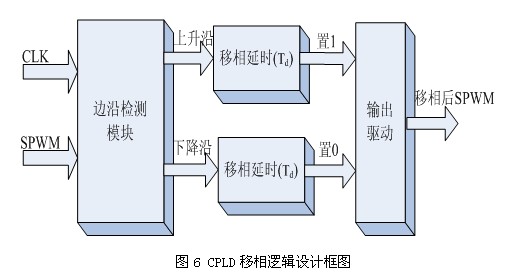
邊沿信號檢測可以利用邊沿觸發(fā)的觸發(fā)器去檢測上升沿或下降沿,但是這種方式對于邊沿的檢測過于敏感,系統(tǒng)中的一個尖峰干擾將會導(dǎo)致邊沿檢測的誤判,我們進(jìn)行多次采樣,比較前后幾次采樣的結(jié)果,再來判別邊沿是否到來。
移相延時部分最重要的是對延時時間的選擇,延時時間長或短都會影響到系統(tǒng)的性能,本設(shè)計中,第二級功率單元的延時時間根據(jù)公式(2)計算得到:
 (2)
(2)
其中, 為三角載波頻率,N為逆變器輸出電平數(shù)。
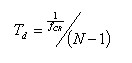
經(jīng)過CPLD移相后,A相三個功率單元的左橋臂控制信號如下圖7所示,第一級功率單元的輸出如圖8,圖9是A相三個功率單元輸出疊加后的波形。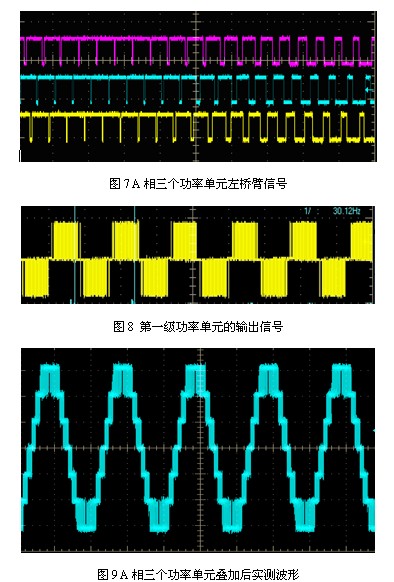
利用DSP和CPLD相結(jié)合的方法實現(xiàn)載波移相多電平PWM,使單元級聯(lián)型多電平技術(shù)變得更加模塊化,同時使產(chǎn)品的升級變得更簡單化。不需要改變DSP中的程序,也不需要改變DSP部分的硬件電路設(shè)計,只需要改變CPLD中Td的時間,并相應(yīng)的增加兩路輸出即可。
5 總結(jié)
多電平技術(shù)的發(fā)展,需要能夠產(chǎn)生大量的PWM信號的控制器,但傳統(tǒng)的控制器只能提供6路PWM信號,遠(yuǎn)不能滿足要求,仍需要更改大量的代碼,進(jìn)行長期的調(diào)試等等,延長了產(chǎn)品上市的時間。為此本文設(shè)計了基于DSP+CPLD的載波移相多電平PWM實現(xiàn)的方案,該方案不僅可以輸出18路PWM信號,而且稍加修改便可以輸出24路、36路等更多路PWM信號。









評論