深度解析醫療機器人發展現狀與應用前景

通用電氣則在上世紀60年代就開發了第一個外骨骼裝置。它被稱為Hardiman,是一個液壓和電動機身的穿戴設備。由于它太重了,都無法用于軍事用途。現在這一領域也涌現出了了ReWalk等一系列公司。
本文引用地址:http://www.104case.com/article/201704/346655.htm在機器人外骨骼的幫助下,中風患者可以比傳統的物理治療更快的恢復手臂運動能力。傳感器檢測肌肉力量、運動范圍和腦活動,還能告知治療師患者的進展。這類機器還有助于重新訓練大腦,使健康的區域能夠補償損傷的區域。機器人系統還幫助患者重新學習步行和其他運動技能。
配備了微處理器的人工膝關節在1993年開始進入市場。1998年,Adaptive Prosthesis將微處理器與液壓和氣動控制相結合,讓假肢有了更自然的行走能力,對步行速度變化的應對也更靈敏。同期,首次亮相于1997年的C-Leg,進一步加強了膝蓋彎曲控制。它已經發展的很精細,可適應每個用戶的不同情況,并能進行像溜冰鞋和騎自行車這樣的運動。
如今機器人假肢還有了附著于肌肉和神經的傳感器,使患者能夠感受到觸覺,甚至是用思維控制運動。仿生手還具備了精細的運動技能,可以完成寫作,打字或彈鋼琴這樣的任務。

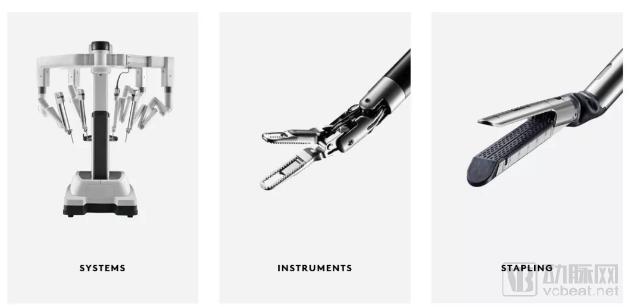
醫療機器人的應用范圍近年來蓬勃發展。達芬奇機器人早已在醫院執行了成千上萬次手術,甚至已經具備了縫葡萄皮的精確能力。據報道,到2015年,達芬奇手術系統當年就做了不下600000場次的手術。它可用于各種手術,范圍從心臟瓣膜修復到腫瘤切除。
不過仍要注意的是,醫療機器人,特別是自主的外科手術機器人,仍處于初級階段。比如,柔性控制問題,針對柔性所帶來的精準感控還沒有解決;比如,多信息集成以及可視化和傳感,以及怎樣做到最全面的人機交互等等。甚至在監管和準入上也有諸多問題,安全和有效是醫療器械注冊的必過門檻。
未來的醫用機器人肯定會讓創傷越來越小,做到簡單、安全、集成,并且適合醫生操作的習慣。甚至未來會是直接控制,做到主從一體化,更小更方便。
可以說,機器人手術已經完成了消除腹腔鏡手術限制的這一目標。甚至,現代醫學領域中最新最創新的技術,可以簡單歸結為:機器人。
附:關于醫療機器人的歷史小細節
世界上第一臺手術機器人是1983年,在加拿大溫哥華首次開發和使用的Arthrobot,一種髖關節置換手術機器人。
手術機器人的首次使用是1985年的PUMA 560。
Intuitive Surgical公司在1995年成立。
2003年12 月,在美國Tampa,一名女子的丈夫在醫生使用手術機器人意外切斷主血管后死亡,醫院被起訴。
2006年5月,意大利進行了第一起無人操作的機器人手術。
2008年6月,德國航空航天中心(DLR)開發出了第一個擁有力反饋的微創手術機器人系統。
2010年9月,盧布爾雅那大學醫學中心進行了一次股骨脈管系統機器人手術,這次使用的可以說是真正的機器人,因為它沒有復刻人手的動作,而是在按下按鈕后自行操作。






評論