無人駕駛路上:激光雷達和攝像頭都干了些什么?

對車道線的檢測主要分成三個步驟:
本文引用地址:http://www.104case.com/article/201612/341208.htm第一步,對獲取到的圖片預處理,拿到原始圖像后,先通過處理變成一張灰度圖,然后做圖像增強;
第二步,對車道線進行特征提取,首先把經過圖像增強后的圖片進行二值化( 將圖像上的像素點的灰度值設置為 0 或 255,也就是將整個圖像呈現出明顯的黑白效果),然后做邊緣提取;
第三步,直線擬合。
車道線檢測難點在于,對于某些車道線模糊或車道線被泥土覆蓋的情況、對于黑暗環境或雨雪天氣或者在光線不是特別好的情況下,它對攝像頭識別和提取都會造成一定的難度。
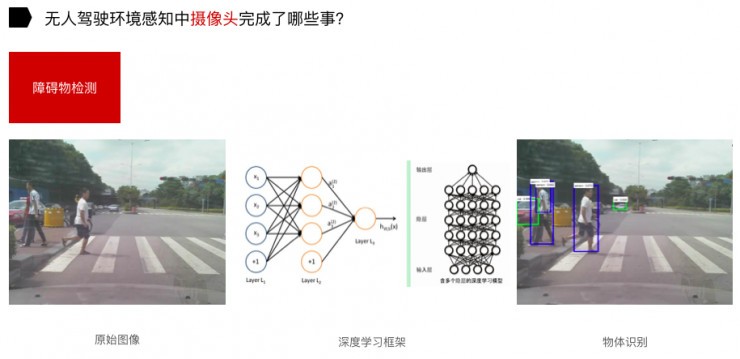
另一個是障礙物檢測。上圖是我們在十字路口做的實驗,獲取到原始圖像后,通過深度學習框架對物體進行識別。在這當中,做訓練集其實是主要的難點。
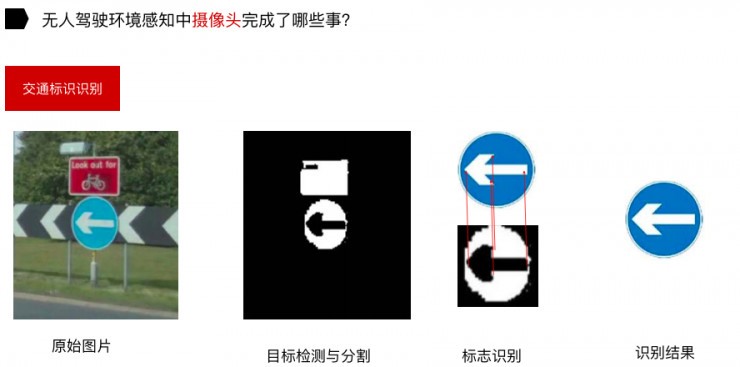
還有一個是道路標識的識別,這一部分的研究比較多,這里不再贅述。

激光雷達能夠完成什么工作?
第一是路沿檢測,也包括車道線檢測;第二是障礙物識別,對靜態物體和動態物體的識別;第三是定位以及地圖的創建。
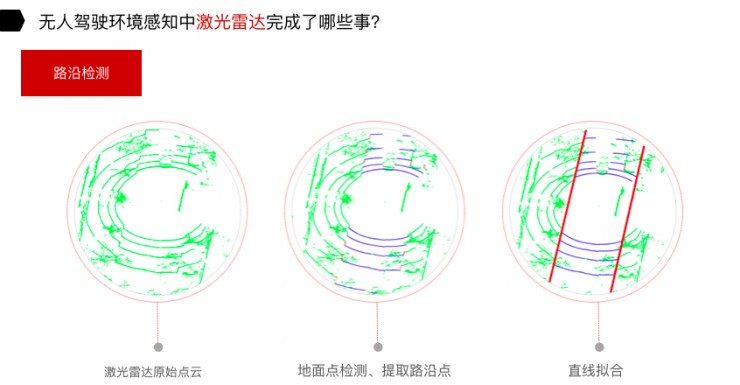
對于路沿檢測,分為三個步驟:拿到原始點云,地面點檢測、提取路沿點,通過路沿點的直線擬合,可以把路沿檢測出來。

接下來是障礙物識別,識別諸如行人、卡車和私家車等以及將路障信息識別出來。
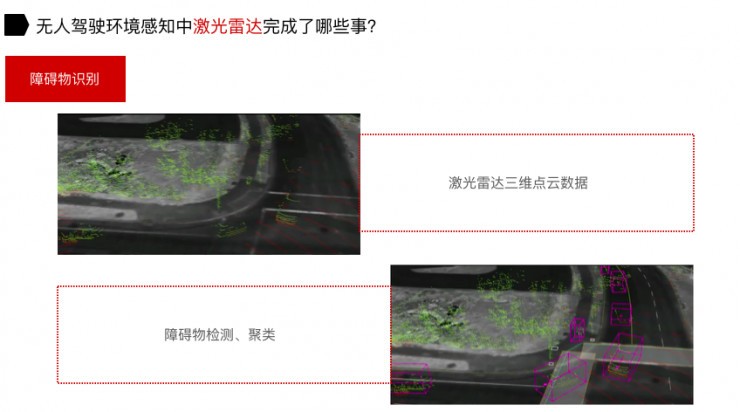
障礙物的識別有這樣幾步,當激光雷達獲取三維點云數據后,我們對障礙物進行一個聚類,如上圖紫色包圍框,就是識別在道路上的障礙物,它可能是動態也可能是靜態的。
最難的部分就是把道路上面的障礙物聚類后,提取三維物體信息。獲取到新物體之后,會把這個物體放到訓練集里,然后用 SVM 分類器把物體識別出來。
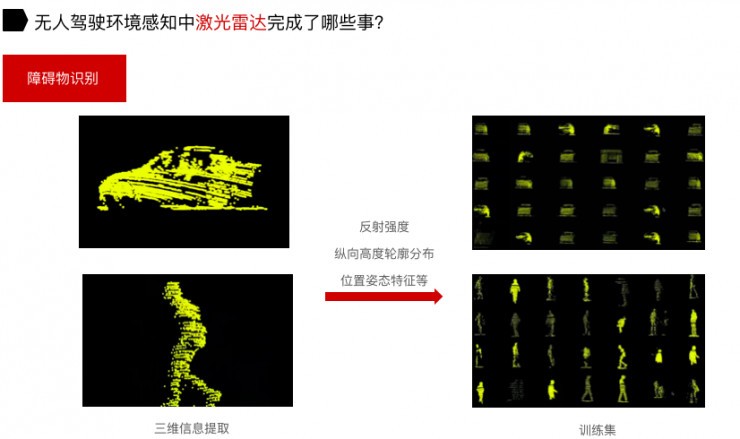
如上圖,左上角、左下角是車還是人?對于機器而言,它是不清楚的。右上角和右下角(上圖)是我們做的訓練集。做訓練集是最難的,相當于要提前把不同物體做人工標識,而且這些標識的物體是在不同距離、不同方向上獲取到的。
我們對每個物體,可能會把它的反射強度、橫向和縱向的寬度以及位置姿態作為它的特征,進行提取,進而做出數據集,用于訓練。最終的車輛、行人、自行車等物體的識別是由SVM分類器來完成。我們用這種方法做出來的檢測精確度還是不錯的。
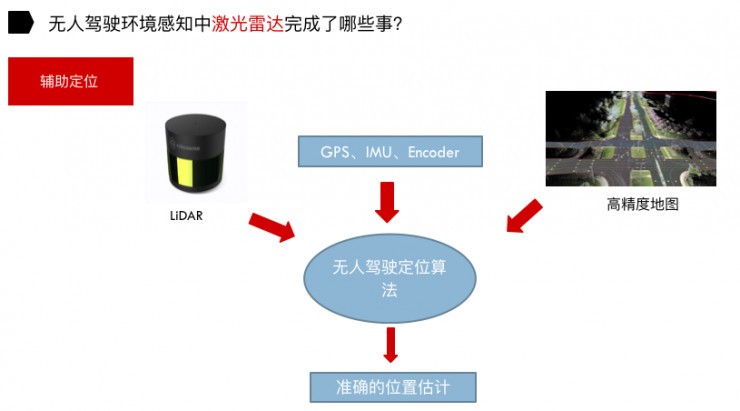
利用激光雷達進行輔助定位。定位理論有兩種:基于已知地圖的定位方法以及基于未知地圖的定位方法。
基于已知地圖定位方法,顧名思義,就是事先獲取無人駕駛車的工作環境地圖(高精度地圖),然后根據高精度地圖結合激光雷達及其它傳感器通過無人駕駛定位算法獲得準確的位置估計。現在大家普遍采用的是基于已知地圖的定位方法。
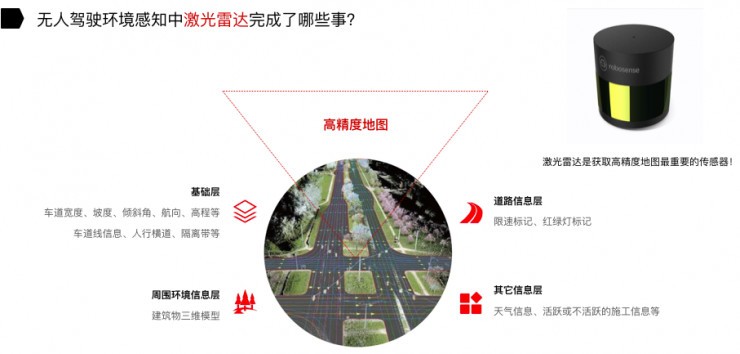
制作高精度地圖也是一件非常困難的事情。舉個例子,探月車在月球上,原來不知道月球的地圖,只能靠機器人在月球上邊走邊定位,然后感知環境,相當于在過程中既完成了定位又完成了制圖,也就是我們在業界所說的 SLAM 技術。
激光雷達是獲取高精度地圖非常重要的傳感器。通過 GPS、IMU 和 Encoder 對汽車做一個初步位置的估計,然后再結合激光雷達和高精度地圖,通過無人駕駛定位算法最終得到汽車的位置信息。



評論