移動機器人路徑規劃算法研究及仿真平臺的設計與實現

一、項目介紹
本文引用地址:http://www.104case.com/article/201612/332301.htm1、項目來源:
當移動機器人處在一個簡單或復雜、靜態或動態、已知或未知的環境中時,機器人的首要任務是感知環境,避開障礙物,然后以最小或較小的消耗(時間、空間或者能量)完成自己的任務,這個過程的基礎所在就是路徑規劃。所謂路徑規劃是指按照一定的性能指標,機器人如何從所處的環境中搜索到一條從初始位置開始的實現其自身目的最優或次優路徑。路徑規劃是機器人研究中的重要領域,通常路徑規劃包括兩個層面的意思:一個是關節機器人空間的路徑規劃;另外一個是移動機器人路徑規劃。前者具有較多的自由度,現在較多的應用于工業機器人中;而后者在近十年來的發展極為迅猛,其研究內容也更為廣闊。我們選取后者作為研究內容。
實際上,移動機器人的路徑規劃方法是基于不同的環境和具體的移動機器人控制體系結構的,在差異較大的環境中對于性能不同的移動機器人來說,不同的路徑規劃方法各有自己的優勢與劣勢。目前還沒有一種規劃方法適合各種環境任何系統,并且有時候選擇不同的規劃方法結合雙方的優點可以取得更好的規劃效果。
二、項目計劃實施內容
- 分析一般路徑規劃算法,了解設計需求;
- 對傳統和智能機器人路徑規劃算法歸納整合,并給出相應的程序;
- 通過環境建模方法,提出機器人路徑規劃仿真系統平臺設計方法,解決環境、機器人、障礙物、路徑等采集與表示問題;
- 建立算法接口,用以將環境信息及路徑規劃算法進行輸入輸出;
- 實現機器人路徑規劃仿真平臺的設計;
通過制作智能車(AGV)實物,通過導航線(特殊的路徑規劃),完成路徑導航算法的測試。
三、預期成果及現階段已取得的研究成果
1、預期研究成果:
- 對移動機器人路徑規劃算法進行研究和分析,為移動機器人系統開發提供基礎;
- 改進或實現部分路徑規劃算法,并利用Matlab或MSRS等軟件仿真;
- 設計并制作智能小車(AGV),設計導航線算法,進行實物驗證,從而驗證算法的可實現性;
- 建立環境模型、障礙物模型、機器人物理模型以及各種傳感器模型,作為方針平臺的底層框架;
- 開發出移動機器人路徑規劃仿真系統平臺;
- 撰寫總結報告一篇,力圖發表兩篇核心期刊論文;
2、現階段已取得的研究成果:
成果一:機器人路徑規劃算法部分
在2011年12月—2011年3月期間,我們對不同的路徑規劃算法進行了研究,并且利用Matlab軟件對其進行編程仿真,并且我們對仿真結果,進行了數據分析和研究,對不同的算法進行了對比,提出了各自的優缺點。
下面我們選取幾種已經做好的算法進行成果展示,分別為A*算法、人工勢場算法等。并且我們又進一步實現了避障及導航線循跡算法,為以后的研究工作奠定了基礎。
附錄為A*算法的流程,對于其他算法的模型及流程,詳見各開發文檔。
1、A*算法matlab仿真結果
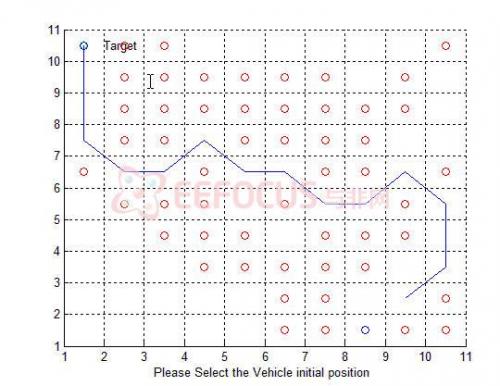
上圖為采用A*算法的路徑規劃結果。圖中紅色圓點表示障礙物,藍色圓點表示起始點。由圖可以看出,A*算法的規劃效果比較好。
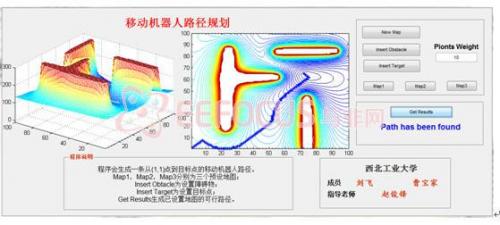
2、人工勢場算法matlab仿真結果
人工勢場法的基本原理就是在機器人所處離散環境中的每一點 賦一個勢場值
賦一個勢場值 ,
, 的值是目標點的引力和障礙物的斥力的疊加。
的值是目標點的引力和障礙物的斥力的疊加。
 和
和 是距離影響因子,
是距離影響因子, 為與目標的距離,
為與目標的距離, 為與障礙物的距離。因此機器人的路徑規劃就是從起始點沿著勢場最快下降的方向達到目標點。
為與障礙物的距離。因此機器人的路徑規劃就是從起始點沿著勢場最快下降的方向達到目標點。
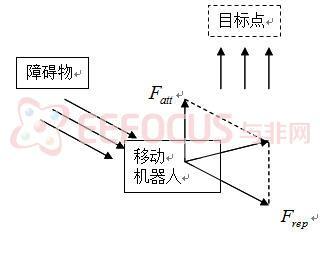
人工勢場受力模型圖
該方法的優點是在數學描述上簡潔,可以使機器人迅速躲開突發障礙物,實時性好,因而經常被用于局部路徑規劃的設計。
但是人工勢場法的缺點也比較多:
如下圖所示,會產生錯誤的結果:
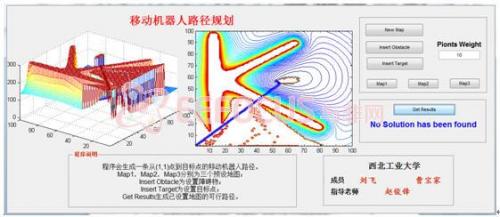
1、存在陷阱區域:就是在路徑規劃中經常會碰到局部極值點,也就是引力和斥力相等,合力為零的點,從而使機器人運動到一個死區,導致規劃失敗。
2、當目標點附近有障礙物時,智能機器人將永遠也到達不了目的地。在以往的一些研究中,目標點和障礙物都離得很遠,當機器人逼近目標點時,障礙物的斥力變的很小,甚至可以忽略,機器人將只受到吸引力的作用而直達目標。但在許多實際環境中,往往至少有一個障礙物與目標點離得很近,在這種情況下,在智能機器人逼近目標的同時,它也將向障礙物靠近,由于引力場函數和斥力場函數的定義,斥力將比引力大得多,這樣目標點將不是整個勢場的全局最小點,因此智能機器人將可能達不到目標。
3、在障礙物密集的區域會產生震蕩,從而無法完成路徑規劃。
4、在連續狹窄的障礙物通道中擺動,或是無法發現路徑。
產生上述問題的原因是由于人工勢場法把所有信息壓縮為單個合力,這樣就造成了把有關局部障礙物分布的有價值的信息拋棄掉的缺陷。

評論