實時自動調平控制系統設計

其中,V為電機轉速,SYSCLOUT為系統時鐘頻率,TxCMP為周期寄存器設定值,NPR為電機驅動器設定的電機轉動一圈所需脈沖數。
位置補償模塊與速度跟蹤模塊實現過程相似,角度誤差最終轉換成電機轉速,補償速度跟蹤模塊程序造成的位置誤差。
2)PID算法模塊程序
PID算法是電機驅動的核心算法,它實現了電機隨傳感器數據實時變速的功能,是實現實時調平的基礎。當傳感器數據經過數據處理后便可由PID算法計算出比例偏差,如果比例偏差大于設定的最小值便進入計算積分項Sk、微分項dk程序,最后計算出PID最終結果:
Upid=KpxekxKIxSk+KDxdk (2)
3 系統主要功能模塊調試與分析
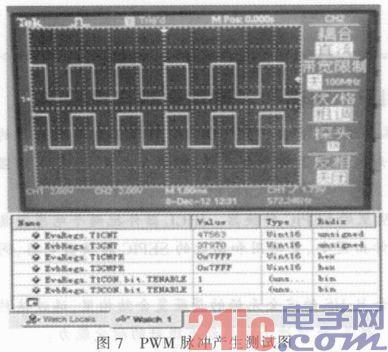
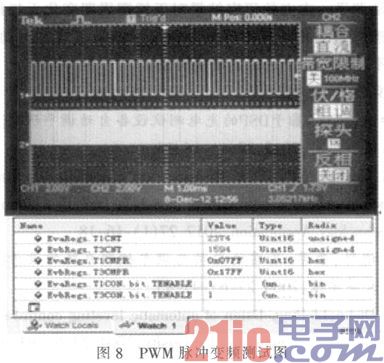
3.1 PWM脈沖功能調試
PWM脈沖功能是DSP控制系統最重要的功能之一,是驅動電機的最主要手段。控制系統通過發送脈沖來控制電機位置,DSP通過改變發送脈沖的頻率來控制調節電機的轉速。文中通過DSP2812的T1PWM與T3PWM管腳分別控制兩個調平電機。PWM功能測試結果如下所示。圖的上半部分為示波器采集圖,下半部分為CCS中程序運行時寄存器的值。由圖7~8可以看出PWM脈沖產生與PWM脈沖頻率改變兩項主要功能都運行正常。
3.2 串口通信功能調試
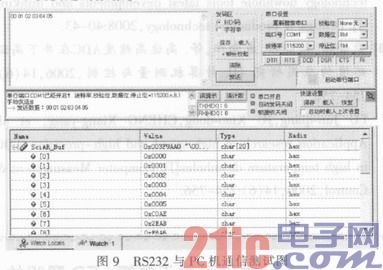
在本文設計中,采集傳感器的數據使用的手段是通過DSP2812中集成的串口通信模塊,串口通信與不同的芯片組合可以構成兩種通信模式:RS232與RS485。由于采用RS485雖然通信距離長,抗干擾強,但是這種方式不能直接與PC機通信,因此本文選用MAX3232元件將通信功能設計成RS232模式。圖9為RS232與PC機通信測試圖,其中上半部分為PC機軟件發送數據圖,下半部分為CCS軟件中寄存器數據觀察窗。測試程序運行過程中,在PC機上通過串口獵人軟件發送一串16進制數據:0x00,0x01,0x02,0x03,0x04,0x05,在寄存器視窗中觀察到數據采集數組中成功的接收到了PC機發送的數據。
3.3 實時調平算法程序調試結果
經過算法程序反復調試,獲得了理想的濾波及PID參數,程序運行效果良好,控制系統可以實現±20°以內最高搖擺速度不高于20°/s的工況內的實時調平,實時調平精度可控制在±0.3°,滿足了武器系統的要求。
4 結論
文中以TMS320F2812為核心,通過濾波算法及PID算法的應用,并通過試驗調整系統參數,實現了某武器系統的實時自動調平。本文的研究結果對于搖擺周期變化無規律,搖擺角度幅值變化無規律等復雜情況下的機電式實時動態自動調平提供了一個通用的解決方法。

評論