實時自動調(diào)平控制系統(tǒng)設計

穩(wěn)定平臺能夠有效的隔離載體運動,確保安裝于穩(wěn)定平臺上的裝置工作時不會受載體的運動影響。無論在軍事上還是在民用中穩(wěn)定平臺都有著重要的用途。本文的主要研究對象屬于實時穩(wěn)定平臺。實時穩(wěn)定平臺的載體處于運動狀態(tài),要求負載如艦載武器等在載體運動的狀態(tài)下可靠穩(wěn)定地工作,多見于高技術含量的武器系統(tǒng)如艦載設備、機載設備等,實時穩(wěn)定平臺對于穩(wěn)定平臺的快速性及動態(tài)精度要求較高,手動或滯后調(diào)平已經(jīng)不能滿足要求。
1 系統(tǒng)組成
1.1 調(diào)平原理
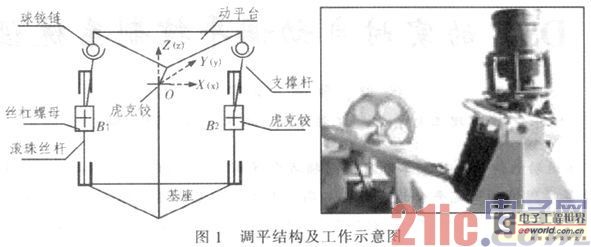
調(diào)平系統(tǒng)的結構原理示意圖如圖1所示,主要由動平臺,三自由度球鉸鏈,支撐桿,二自由度虎克鉸,絲桿螺母和滾珠絲桿,基座等部件構成。動平臺通過支點A1,A2及O點分別與平臺的基座和傳動支鏈相連接,并構成以O點為直角的等腰直角三角形A1A2O。系統(tǒng)工作時,當檢測到動平臺處于非水平狀態(tài)后,控制系統(tǒng)經(jīng)過解算得出兩球鉸應上升或下降的行程,然后驅動電機經(jīng)傳動機構(減速箱)控制絲桿轉動帶動絲桿螺母上移或下移,繼而支撐桿帶動球鉸控制動平臺進行穩(wěn)定調(diào)平運動。系統(tǒng)調(diào)試時由一個電機通過帶輪驅動曲柄搖桿機構帶動系統(tǒng)進行搖擺動作,控制系統(tǒng)控制電機進行實時調(diào)平。
1.2 控制系統(tǒng)硬件構成
系統(tǒng)由傾角檢測部分,控制部分,通信部分,執(zhí)行部分,限位保護部分,狀態(tài)顯示部分組成,主要包括TMS320F2812芯片,升降壓電路,485串口通信模塊,角度陀螺儀,角速度陀螺儀,電機驅動器,限位開關,狀態(tài)顯示模塊等。系統(tǒng)硬件工作原理如圖2所示。
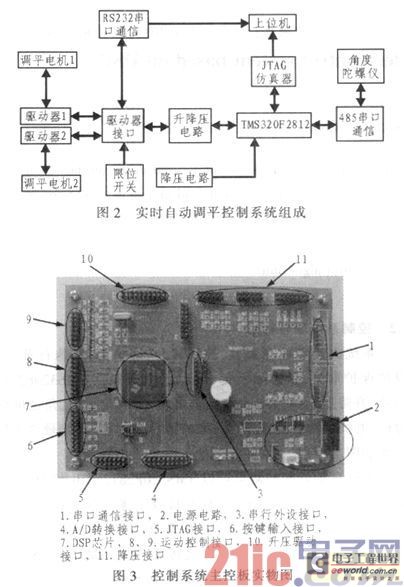
實時自動調(diào)平控制系統(tǒng)以TMS320F2812芯片為核心,通過485串口通信控制陀螺儀并接收陀螺儀角度數(shù)據(jù),通過濾波處理,得到系統(tǒng)擺動角速度與傾角狀態(tài),經(jīng)過TMS320F2812芯片計算得出電機轉速,再由TMS320F2812的兩路脈沖信號經(jīng)過升壓電路分別發(fā)送給兩臺電機驅動器驅動電機進行調(diào)平。驅動器可通過降壓電路把電機實際精確位置信息反饋給控制系統(tǒng)。限位開關可保證不會發(fā)生超量程動作導致機械結構損壞的現(xiàn)象。上位機可通過JTAG仿真器與控制系統(tǒng)連接,實現(xiàn)調(diào)試試驗程序、下載等功能,也可通過RS232串口與驅動器連接,方便監(jiān)測電機系統(tǒng)狀態(tài)。狀態(tài)顯示可觀測到系統(tǒng)調(diào)平狀態(tài)及有無錯誤發(fā)生。
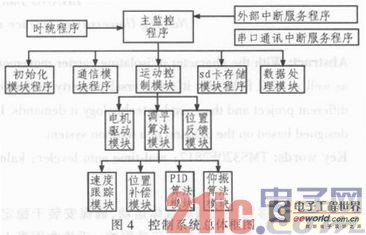
控制系統(tǒng)主控板如圖3所示。該控制板的主要功能模塊電路與硬件設計章節(jié)所述基本一致。控制板以TMS320F2812為核心,其集成的通信模塊與電機控制模塊非常適合本系統(tǒng)功能的實現(xiàn)。除此之外還通過通用I/O口設計了電機、傳感器等接口電路以及按鍵應用,在控制板背面還設計了SD卡模塊。
2 實時調(diào)平控制方案
2.1 實時調(diào)平控制系統(tǒng)軟件總體框圖設計
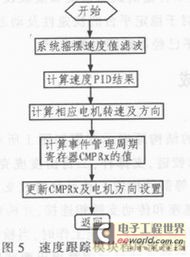
控制系統(tǒng)軟件采用C語言編寫,采用模塊化設計,便于調(diào)試。控制系統(tǒng)軟件包括主監(jiān)控程序、初始化模塊程序、運動控制模塊程序、數(shù)據(jù)處理模塊程序、SD卡存儲模塊程序、通信模塊程序等組成,其中運動控制模塊又分為:電機驅動模塊、調(diào)平算法模塊、位置反饋模塊等。控制系統(tǒng)軟件總體框圖如圖4所示。
2.2 實時調(diào)平控制算法程序設計
調(diào)平算法模塊包括3個部分:速度跟蹤與位置補償模塊、PID算法模塊。其中速度跟蹤模塊使調(diào)平機構在系統(tǒng)搖擺時能夠以相同的速度反向運動以實現(xiàn)調(diào)平粗調(diào);位置補償模塊可以使得調(diào)平系統(tǒng)減小靜態(tài)誤差,在動態(tài)調(diào)平過程中減小動態(tài)誤差積累;PID算法實現(xiàn)了電機運動狀態(tài)隨著系統(tǒng)搖擺速度而實時變速的功能;抑振模塊改善了系統(tǒng)的動態(tài)性能,使得調(diào)平快速響應性能以及動態(tài)精度進一步提高。
1)速度跟蹤與位置補償模塊程序
速度跟蹤模塊及位置補償模塊程序流程圖如圖5~6所示。
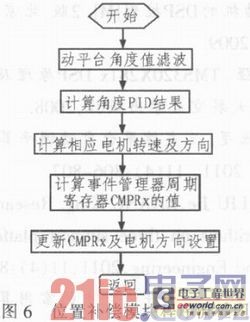
當控制系統(tǒng)采樣速度經(jīng)過濾波,并計算出速度PID結果后,依據(jù)傳動鏈傳動比及絲桿螺母速度與動平臺角速度之間的關系便可得到電機轉速。由電機轉速便可計算出事件管理器周期寄存器設置值,最后更新周期寄存器的值便可改變電機轉速。電機轉速與周期寄存器設定值之間的關系如下。

評論