高壓同步電機全數字化矢量控制變頻器

三相定子繞組靜止電氣方程:

同步電機采用改進的空間矢量磁場定向控制策略,控制系統采用速度環和電流環雙閉環結構,電流環采用pi調節器,實現簡單,并能獲得較好的電流跟蹤性能。速度環采用pi調節器,能有效地限制動態響應的超調量,加快響應速度。系統采用轉速、電流雙閉環調速系統;系統全數字式的關鍵是電流環數字化,就是把數模混合式變頻系統中的模擬電流環,采用數字方式加以實現,其核心是提高電流環的處理速度,達到或接近模擬電流環的響應速度。根據目前的微處理器dsp、a/d器件的水平,可以滿足硬件的需要;另一方面在于控制策略及控制軟件的優化。良好的系統硬件和軟件設計是使研制的系統達到實用化的保證,在滿足性能要求的基礎上,必須充分利用硬件資源,提高集成度,降低硬件成本,達到產品化的目標。
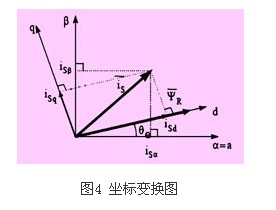
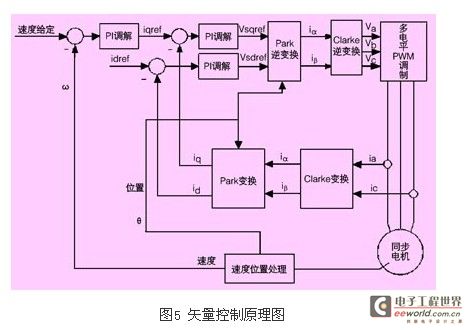
矢量控制系統的解耦,速度給定ω與速度反饋相減得出速度誤差,速度誤差經pi調節后輸出轉矩電流給定,iq,id勵磁電流給定是根據系統的動態需要進行調整,其值根據不同的電機和負載得出的經驗值。電機三相電流反饋ia、ic、ib經傳感器采樣,然后再根據轉子位置電氣角度θ進行clarke變換,變換后輸出iα、iβ,iα、iβ經park變換輸出id、iq, id、iq值與給定值iqref、idref求誤差,進行pi調節后輸出vq、vd,電壓矢量和轉子位置電氣角度θ經過park逆變換,clarke逆變換,輸出電機定子三相電壓va、vb、vc值,三相電壓va、vb、vc值作為pwm(脈寬調制)的比較值比較,輸出pwm波形到逆變器然后驅動電機旋轉。
整個系統的控制原理框圖如圖5所示。
本方案的同步電機的勵磁電流是if是按照固定勵磁電流給定方式工作。對于同步電機的轉子勵磁電流if的給定,通過對同步電機的空載特性試驗和短路實驗,測出電機的各項參數并計算出所需運行的額定勵磁電流,此時根據額定的勵磁電流if調節定子側的去磁電流idref就可以調節系統的功率因數,功率因數角δ=arctan(iq)/(id),控制idref就可以使得系統是運行在功率因數超前還是滯后。
2.5硬件主控實現部分
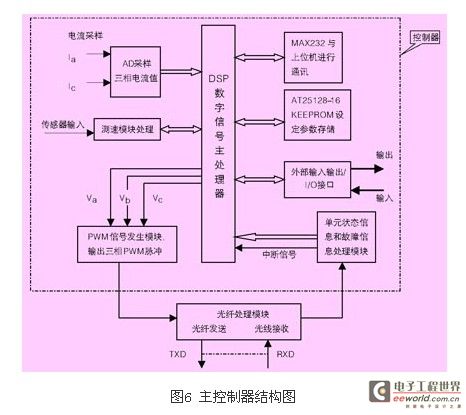
系統的軟硬件控制如圖6所示,由dsp數字信號處理器作為主控cpu,可編程邏輯器件實現部分算法的計算和波形發生及各種信號的處理,ad采樣處理電流電壓反饋信號并傳到dsp,單元與主控板cpu的通信采用光纖串行高速通信方式,單元的狀態信息經可編程邏輯器件進行串行編碼后通過光纖發送到主控制器的接收板,主控制器接收板進行串行到并行解碼后傳輸到主控cpu;主控cpu根據單元的狀態信息,調整系統的控制狀態;速度與位置傳感器的信號經傳感器板、可編程邏輯器件進行串行編碼后,經高速串行傳輸到主控器板的可編程邏輯器件,可編程邏輯器件對傳感器反饋的速度位置信號進行運算處理,測速方式采用變m/t測速,可以實現高精度的測速要求,可編程邏輯器件計算出速度和位置的有效值,并對傳感器檢測有無故障狀態,上報主控cpu,同時主控cpu可以根據測速的要求動態調整測速方式和時間;本系統中的電流檢測元件選擇了根據磁場補償原理制成的霍爾效應電流互感器,以滿足實時監測電流的要求,電機的三相電流和電壓信號經信號處理電路處理后,變成模擬電壓信號輸入到主控板的ad轉換芯片,該ad芯片可以在瞬時情況下對三相的電壓電流信號進行采樣保持并轉換,這樣能保證真實的再現電機瞬態三相電壓電流的波形,ad轉換芯片采樣完成后上傳三相的數據;主控制cpu與上位系統采用的是rs-232通訊模式,實時地接收上位機給定的各項參數設定值,并上報整個系統的運行狀態和各項數據;系統的外部i/o輸入輸出經隔離傳輸到主控cpu的i/o口,主控cpu根據控制要求作出相應的執行控制;at25128是串行eeprom與主控cpu通信采用spi方式,eeprom主要起著保存上位系統各項設定參數值和存儲系統的一些運行狀態信息;主控cpu采用的是dsp它是ti公司c2000系列的tms320lf2407a,dsp是一種高速的微處理器,其最大特點是運算速度快,比目前16/32位微處理器和單片機的運算速度至少快一個數量級,dsp這種高運算處理能力能夠滿足電流環實時控制的高要求,可以同時對電機的轉子位置和速度進行辨識以實現無速度傳感器矢量控制要求,并且可以采用先進的現代控制策略,獲得更高的控制性能,更完善的功能;整個硬件的原理框圖如圖6所示。
2.6可編程邏輯器件的實現原理
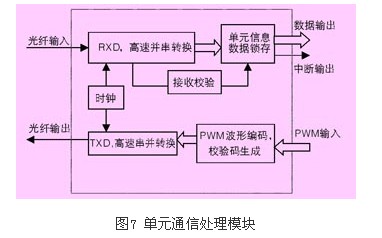
單元模塊與主控制器的通訊采用光纖串行高速通訊模式,其通訊速率為4mhz,這樣可以滿足實時控制要求,每個模塊與主控制板通訊采用雙工模式,可編程邏輯器件發出的pwm波形信號經編碼后并串轉換,通過光纖驅動發送到單元模塊,同時可編程邏輯器件接收單元的串行編碼進行串并轉換,把單元的狀態信息和故障信號以中斷方式上傳給主控dsp,具體如圖7所示。
傳感器信號的測速,對串行輸入的編碼進行解碼輸出電機轉子的位置信號數據,根據傳感器的轉速脈沖信號進行測速,測速方式采用變m/t測速,根據測速的m值與t值進行數據運算得出轉子的轉速。由于采用了可編程邏輯器件硬件邏輯測速方式,使得測速范圍很寬和精度很高,能夠滿足系統精度要求。

評論