高壓同步電機全數字化矢量控制變頻器

電力電子技術的主要任務為實現電能的轉換,它的主要研究目標是節能,努力挖掘一切潛在的提高效率的途徑,來節省有限的能源,保護人類生存的環境。功率變換技術正是實現這一目標的重要手段,所以它始終是電力電子學的核心技術。經過三十多年,特別是近十多年的發展,功率變換技術已比較成熟,近年來的發展動向主要集中在軟開關、高壓、大功率和低壓、大電流變換技術方面。
近年來交流異步電機的調速應用得到較快的發展,與交流異步電機相比較,同步電機有著先天的優勢,異步電動機由于勵磁的需要,必須從電源吸取滯后的無功電流,空載時功率因數很低。而同步電動機則可通過調節轉子的直流勵磁電流,改變輸入功率因數,可以滯后,也可以超前。當cosθ=1時,電樞銅損最小,還可以節約變壓變頻裝置的容量。由于同步電動機轉子有獨立勵磁,在極低的電源頻率下也能運行,因此,在同樣條件下,同步電動機的調速范圍比異步電動機更寬。異步電動機要靠加大轉差才能提高轉矩,而同步電機只須加大功角就能增大轉矩,同步電動機比異步電動機對轉矩擾動具有更強的承受能力,能作出更快的動態響應。由于交流同步電機在可靠性與維護量、功率因數、電機尺寸與轉動慣量、控制精度、弱磁比等方面有其自身的優勢,對于大容量電機,世界各國已基本趨向于使用同步電機。比如工業應用上大功率空氣壓縮機、水泵、煤炭與有色金屬行業中的大功率提升機和鋼廠大容量軋鋼機等均采用同步電機驅動。
交流同步電機的調速是電氣驅動領域的一大難題,我國從20世紀70年代開始進行交流同步電機調速技術的研究,80年代初已研制成功交—交變頻同步電機的實驗樣機,但大功率交流變頻調速裝置直到90年代后期才得到發展。目前國產大功率變頻裝置成功應用于同步電機的實例很少,都是國外品牌一統天下。目前我國大型同步電機應用變頻調速雖然剛剛起步,但國外已經廣泛使用。通過他們長期的運行實踐表明:應用高壓大功率變頻調速系統的經濟效益良好、其可靠性也可以得到保證。因此我國高壓同步電機變頻調速裝置將來的市場前景巨大。
國內大功率交流同步電機傳動方面,以交-交變頻調速傳動為主。這些變流、變頻傳動裝置功率大,一般為幾百千瓦至數千千瓦。在水泥,采礦與礦山行業、船舶行業、冶金行業、化工,石油與天然氣行業、電力行業、紙漿造紙行業、供水與污水處理、煤炭、有色金屬等特別是礦山的大型礦井提升機傳動與調速等領域已有較多的應用。大容量、低轉速、高過載、響應快、四象限運行等傳動領域主要用于礦井提升機和鋼鐵廠的主軋機,對變頻器的控制要求特別嚴格,這是普通異步電機及其變頻器所不能解決的,在此類系統中應用的大多是大功率同步電機。我國目前在高壓大功率同步電機控制系統中采用的技術主要以交-交控制方式的變頻為主,還有交-直-交方式,交-交變頻器由于其控制原理方式的制約,造成其功能和應用范圍受限。交-交變頻器的結構方式把電網頻率的交流電變成可調頻率的交流電,屬于直接變頻電路,廣泛用于大功率交流電動機調速傳動系統。改變切換頻率,就可改變輸出頻率;改變交流電路的導通角,就可以改變交流輸出電壓幅值;輸出頻率增高時,輸出電壓一周期所含電網電壓段數減少,波形畸變嚴重,電壓波形畸變及其導致的電流波形畸變和轉矩脈動是限制輸出頻率提高的主要因素。輸出波形畸變和輸出上限頻率的關系,很難確定明確界限。例當采用6脈波三相橋式電路時,輸出上限頻率不高于電網頻率的1/3~1/2。電網頻率為50hz時,交-交變頻電路的輸出上限頻率約為20hz。
還有一種變頻器是交-直-交型高壓變頻器,這種變頻器的驅動高壓同步電機的方式目前以v/f控制為主,這種方式在一些對調速比要求不高,動態響應低的場合適用,它的控制方式是采用異步電機的控制策略,啟動過程:高壓同步電機先進行異步變頻啟動,等轉速接近同步轉速時,再對轉子投入勵磁電流,使系統進入同步轉速運行。這種控制方式的缺點是,響應慢,調速比小, 不能發揮同步電機的特長,不能實現四象限運行,高壓同步電機輸出的轉矩低,起動電流大,容易失步,這種變頻器只能用于負載較輕,負載變化不大的場合。
隨著微電子技術的發展和應用,計算機用于控制,使交流變頻控制系統由模擬式進入數模混合式,進一步發展到全數字式,實現控制方案和控制策略的軟件化,在控制系統全數字化的情況下,由于改變軟件即可改變控制模式和參數,這就大大提高了系統的通用性和靈活性,簡化了系統的硬件結構,并可采用一些基于現代控制理論的控制算法來提高系統的性能。更重要的是,隨著現代通信技術、遠程控制技術、總線技術和自動化技術的發展,全數字方式是未來發展的必然趨勢。因此全數字化交-直-交大功率同步電機矢量控制器的應用是未來應用的方向,這方面在我國的應用和研究還是空白,變頻調整控制方法的進展主要體現在由早期的靜態控制方式向高動態性能的四象限運行的矢量控制發展,采用這種控制方式可以有效地解決高壓同步電機的動態響應、調速比寬等要求,系統可以恒轉矩輸出。
2 全數字化矢量控制方式技術方案的原理
2.1技術方案詳細闡述
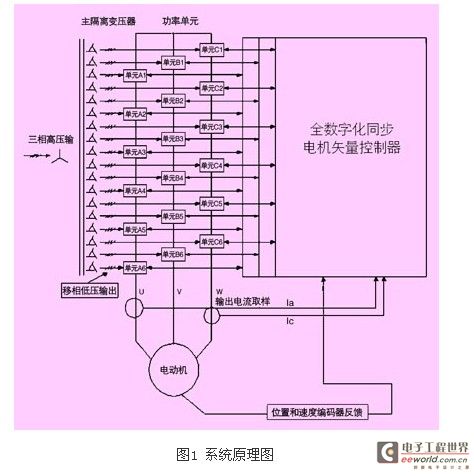
鑒于現有技術缺點,和要實現的技術目的,我們要實現的高壓同步電機矢量控制變頻器的實現由以下技術特點和單元組成,三相高壓電輸入移相隔離變壓器,經移相隔離降壓多路交流輸出后,輸入到帶能量回饋的功率單元igbt整流并濾波成直流再經igbt逆變輸出到同步電機;電機的位置速度傳感器反饋的信號經高速串行編碼傳輸方式傳送給主控板的fpga進行解碼處理后,送給dsp進行數據運算處理;電流反饋經霍爾傳感器采樣,上傳信號板經模擬信號處理電路濾波處理后再上傳給dsp主控板的ad采樣并運算;主控板與上位機的人機界面進行實時數據通信,并上報系統的各項運行參數和故障狀態;輸入輸出信號單元板與主控制器進行通迅,處理外部輸入輸出信號的控制功能;系統的原理如圖1所示。
2.2交-直-交單元串聯多電平方式
現在國內的同步電機變頻器,大部分采用的是交-交變頻,和交-直-交變頻器相比,缺點:驅動晶閘管復雜;輸出頻率范圍低,只能達到電網頻率得1/3運行;功率因數低,諧波污染嚴重。在一些控制場合,交-交變頻器的原理帶來了它在高速上的應用不能實現和動態響應慢的缺點。
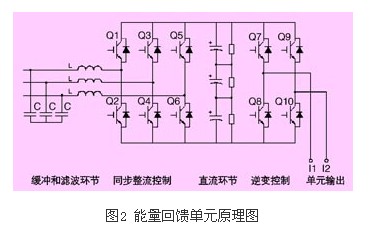
交-直-交方式使用移相的目的可以提高整流設備的脈波數,減小網側高次諧波,整流變壓器采用二次側延邊三角形移相,交-直-交方式頻率調速范圍寬,功率變換電路采用多電平變換器,如圖2所示,各級功率模塊均采用h全橋igbt驅動方式,由于輸出電平數較多,輸出波形階梯增多,就可以使調制波接近正弦,降低電壓跳變,這樣諧波就少。另一個優點是輸出電壓的dv/dt較小,對負載電機的沖擊小。如一些軋鋼機,提升機,卷揚機。如果采用交-交變頻,必須加減速機構。而交-直-交變頻器可以在設備許可的范圍內,其頻率任意調節,這就解決了上述問題。
2.3基于能量回饋的功率單元
普通高壓變頻器不能直接用于需要快速起、制動和頻繁正、反轉的調速系統,如高速電梯、礦用提升機、軋鋼機、大型龍門刨床、卷繞機構張力系統及機床主軸驅動系統等。因為這種系統要求電機四象限運行,當電機減速、制動或者帶位能性負載重物下放時,電機處于再生發電狀態。由于二極管不控整流器能量傳輸不可逆,產生的再生電能傳輸到直流側濾波電容上,產生泵升電壓。而以gtr、igbt為代表的全控型器件耐壓較低,過高的泵升電壓有可能損壞開關器件、電解電容,甚至會破壞電機的絕緣,從而威脅系統安全工作,這就限制了普通高壓變頻器的應用范圍,而基于能量反饋的系統解決了上述問題,并且實現了真正的節能目標而不是浪費掉能量。
帶能量回饋的功率單元,輸入為移相隔離變壓器副邊降壓繞組的三相,igbt的控制信號為經光纖傳輸過來的pwm信號控制其導通和關斷,輸出經單元串聯后到電機。原理圖如圖2所示。
2.4數字矢量控制方式
矢量控制的目的是為了改善轉矩控制性能,而最終實施仍然是對定子電流的控制。由于在定子側的各物理量(電壓、電流、電動勢、磁動勢)都是交流量,其空間矢量在空間以同步轉速旋轉,調節、控制和計算均不方便。因此,需借助于坐標變換,使各物理量從靜止坐標系轉換到同步旋轉坐標系,站在同步旋轉的坐標系上觀察,電動機的各空間矢量都變成了靜止矢量,在同步坐標系上的各空間矢量就都變成了直流量,可以根據轉矩公式的幾種形式,找到轉矩和被控矢量的各分量之間的關系,實時地計算出轉矩控制所需的被控矢量的各分量值——直流給定量。按這些給定量實時控制,就能達到直流電動機的控制性能。由于這些直流給定量在物理上是不存在的,是虛構的,因此,還必須再經過坐標的逆變換過程,從旋轉坐標系回到靜止坐標系,把上述的直流給定量變換成實際的交流給定量,在三相定子坐標系上對交流量進行控制,使其實際值等于給定值。在矢量變換的控制方法中,需用到靜止和旋轉的坐標系,以及矢量在各坐標系之間的變換,交流同步電機的矢量控制,需要把電機的abc三相定子靜止坐標系的電流ia、ib、ic、變換成α和β兩相靜止坐標系(clarke變換),也叫三相-二相變換,再從兩相靜止坐標系變換成同步旋轉磁場定向坐標系(park變換),等效成同步旋轉坐標系下的直流電流iq、id(id相當于直流電動機的勵磁電流;iq相當于與轉矩成正比的電樞電流),然后模仿直流電動機的控制方法,求得直流電動機的控制量,經過相應的坐標逆變換(park逆變換)(clarke逆變換),實現對同步電動機的控制。其實質是將交流電動機等效為直流電動機,分別對速度,磁場兩個分量進行獨立控制。通過控制轉子磁鏈,然后分解定子電流而獲得轉矩和磁場兩個分量,經坐標變換,實現正交解耦控制。
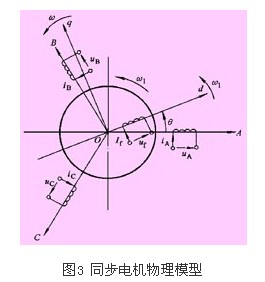
如圖3所示,二極同步電機的物理模型,定子三相繞組軸線a、b、c是靜止的,三相電壓ua、ub、uc和三相電流ia、ib、ic都是平衡的,轉子以同步轉速ω1旋轉,轉子上的勵磁繞組在勵磁電壓uf供電下流過勵磁電流if。沿勵磁磁極的軸線為d軸,與d軸正交的是q軸,d-q坐標在空間也以同步轉速ω1旋轉,d軸與a軸之間的夾角θ為變量。

評論