深挖智能汽車設計要素,你知多少?

在圖9中可發現,PXI-4110可程序化DC電源供應器,即可供應DC偏壓信號。雖然多款現成的電源供應器(其中亦包含價位較低的電源供應器)均可用于此應用中,我們還是使用PXI-4110以簡化作業。同樣的,現有常見的偏壓器(Bias tee)可進行最高1.58GHz的作業,而此處所使用的偏壓器購自于www.minicircuits.com.
方法2:以接收器供電至主動式天線
供電至主動式GPS天線的第二個方法,即是透過天線本身的接收器。大多數的現成GPS接收器,均使用單一端口供電至主動式GPS天線,且此端口亦透過合適的DC信號達到偏壓。若將主動式GPS接收器整合分裂器(Splitter)與DC阻絕器(Blocker),即可供電至主動式LNA,并僅記錄GPS接收器所獲得的信號。下圖即為正確的連結方式:
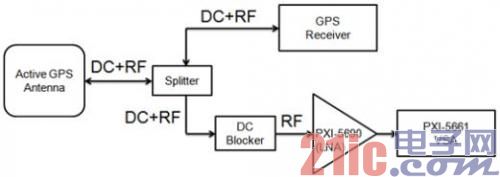
圖10.透過DC阻絕器(Blocker),將可記錄并分析GPS信號
如圖10所示,GPS接收器的DC偏壓即用以供電至LNA.請注意,由于當進行記錄時,即可觀察接收器的相關特性,如速度與精確度衰減(Dilution)情形,因此方法2特別適用于驅動程序測試。
串聯式(Noise figure)噪聲系數計算
若要計算已記錄GPS信號的總噪聲量,只要找出整體RF前端的噪聲系數即可。就一般情況來說,整組系統的噪聲系數,往往受到系統的第一組放大器所影響。在所有RF組件或系統中,噪聲系數均可視為SNRin與SNRout(參閱:測量技術的噪聲系數)的比例。當記錄GPS信號時,必須先找出整體RF前端的噪聲系數。
當執行串聯式噪聲系數計算時,必須先行針對每筆噪聲系數與增益,將之轉換為線性等式;即所謂的“噪聲因子(Noise factor)”。當以串聯的RF組件計算系統的噪聲系數時,即可先找出系統的噪聲因子,并接著轉換為噪聲系數。因此系統的噪聲系數必須使用下列等式計算之:
等式2.串聯式RF放大器的噪聲系數計算作業[3]
請注意,由于噪聲因子(nf)與增益(g)屬于線性關系而非對數(Logarithmic)關系,因此以小寫表示之。下列即為增益與噪聲系數,從線性轉換為對數(反之亦然)的等式:

等式3到等式6.增益與噪聲系數的線性/對數轉換[3]
內建低噪聲放大器(LNA)的主動式GPS天線,一般均提供30dB的增益,且其噪聲系數約為1.5dB.在儀控記錄作業的第二階段,則由NIPXI-5690提供30dB的附加增益。由于其噪聲系數較高(5dB),因此第二組放大器僅將產生極小的噪聲至系統中。在教學實作中,可針對記錄儀控作業的完整RF前端,使用等式2計算其噪聲因子。增益與噪聲系數值即如下圖所示:

圖11.RF前端的首2組組件噪聲系數與因子。
根據上列計算,即可找出接收器的整體噪聲因子:
等式7.RF記錄系統的串聯噪聲系數
若要將噪聲因子轉換為噪聲系數(單位為dB),則可套用等式3以獲得下列結果:
等式8.第一組LNA的噪聲系數將影響接收器的噪聲系數
如等式8所示,第一組LNA(1.5dB)的噪聲系數,將影響整組測量系統的噪聲系數。透過VSA的相關設定,可讓儀器的噪聲水平(Noise floor)低于輸入激發的噪聲水平,因此用戶所進行的記錄作業,將僅對無線信號造成1.507dB的噪聲。
對GPS接收器發出信號
由于多款接收器可使用合適的軟件,讓用戶呈現如經度與緯度的信息,因此需要更標準化的方式進行自動測量作業。還好,目前有多款接收器均可透過眾所周知的NMEA-183協議,以設定對PXI控制器發出信號。如此一來,接收器將可透過序列或USB連接線,連續傳送相關指令。在NILabVIEW中,所有的指令均可轉換語法,以回傳衛星與定位信息。NMEA-183協議可支持6種基本指令,并各自代表專屬的信息。這些指令即如下表所示
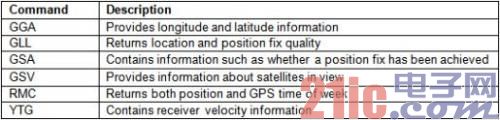
圖12.基本NMEA-183指令概述
以實際測試需要而言,GGA、GSA,與GSV指令應最為實用。更值得一提的是,GSA指令的信息可用于了解接收器是否可達到定位作業需要,或可用于首次定位時間(Time To First Fix,TTFF)測量。當執行高敏感性的測量時,實際可針對所追蹤的衛星,使用GSV指令回傳C/N(Carrier-to-noise)比。
雖然無法于此詳細說明MNEA-183協議,但可至其他網站尋找所有的指令信息,如:http://www.gpsinformation.org/dale/nmea.htm#RMC.在LabVIEW中,這些指令可透過NI-VISA驅動程序轉換其語法。
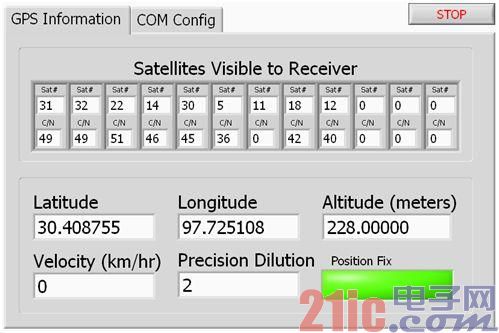
圖13.使用NMEA-183協議的LabVIEW范例
GPS測量技術
目前有多種測量作業可為GPS接收器的效能進行特性描述(Characterization),其中亦有數種常見測量可套用至所有的GPS接收器中。此章節將說明執行測量的理論與實作,如:靈敏度、首次定位時間(TTFF)、定位精確度/可重復性,與定位追蹤不定性(Uncertainty)。應注意的是,還有許多不同的方式可檢驗定位精確度,并執行接收器追蹤功能的測試。雖然接著將說明多種基本方式,但仍無法概括所有。
靈敏度(Sensitivity)測量作業介紹
靈敏度為GPS接收器功能的最重要測量作業之一。事實上,對多款已量產的GPS接收器來說,僅限為最后生產測試所執行的RF測量而已。若深入來說,靈敏度測量即為“接收器可追蹤并接收上方衛星定位信息的最低衛星功率強度”。一般人均認為,GPS接收器必須串聯多組LNA以達極高的增益,才能將信號放大到合適的功率強度。事實上,雖然LNA可提升信號功率,亦可能降低SNR.因此,當GPS信號的RF功率強度降低時,SNR也將跟著降低,最后讓接收器無法追蹤衛星。













評論