一種低成本城市停車(chē)誘導(dǎo)系統(tǒng)中區(qū)域性Zigbee網(wǎng)絡(luò)的
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
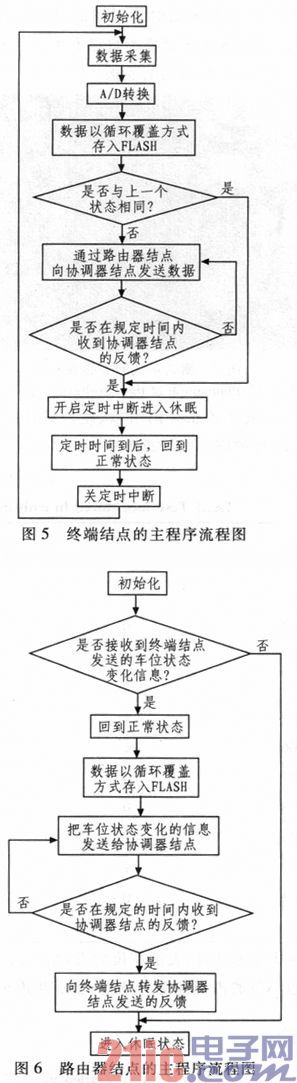
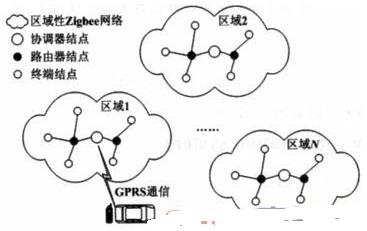
終端結(jié)點(diǎn)的主程序流程圖如圖5所示。初始化后對(duì)車(chē)位檢測(cè)傳感器進(jìn)行數(shù)據(jù)采集,得到的數(shù)據(jù)經(jīng)過(guò)CC2530自帶的A/D模塊進(jìn)行AD轉(zhuǎn)換,然后以循環(huán)覆蓋的方式存入CC3530內(nèi)部的FLASH。之后,判斷當(dāng)前狀態(tài)與上一個(gè)狀態(tài)是否相同。若車(chē)位狀態(tài)發(fā)生變化,由Zigbee射頻模塊通過(guò)路由器結(jié)點(diǎn)向協(xié)調(diào)器結(jié)點(diǎn)發(fā)送數(shù)據(jù),并等待協(xié)調(diào)器結(jié)點(diǎn)的反饋。若在規(guī)定的時(shí)間內(nèi)沒(méi)有收協(xié)調(diào)器結(jié)點(diǎn)的反饋,則重發(fā)數(shù)據(jù);若收到反饋,則開(kāi)啟定時(shí)中斷后進(jìn)入休眠狀態(tài)。接下來(lái)等待定時(shí)中斷喚醒,進(jìn)行下一次的數(shù)據(jù)采集。
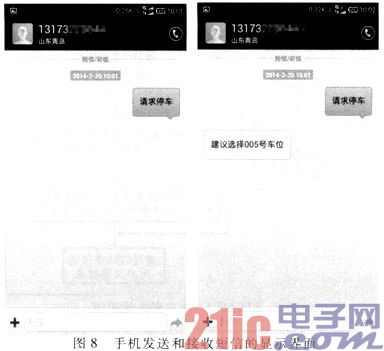
路由器結(jié)點(diǎn)的主程序流程圖如圖6所示,若接收到終端結(jié)點(diǎn)發(fā)送的車(chē)位狀態(tài)變化信息,則產(chǎn)生外部中斷,從休眠狀態(tài)回到正常狀態(tài)。然后以循環(huán)覆蓋的方式存入CC3530內(nèi)部的FLASH。接著將車(chē)位狀態(tài)變化的信息發(fā)送給協(xié)調(diào)器結(jié)點(diǎn),并等待協(xié)調(diào)器結(jié)點(diǎn)的反饋。若在規(guī)定的時(shí)間內(nèi)沒(méi)有收到反饋,則進(jìn)行重發(fā);否則,向終端結(jié)點(diǎn)轉(zhuǎn)發(fā)協(xié)調(diào)器結(jié)點(diǎn)發(fā)送的反饋,之后進(jìn)入休眠狀態(tài),等待外部中斷喚醒。
5 實(shí)物展示及模擬運(yùn)行結(jié)果
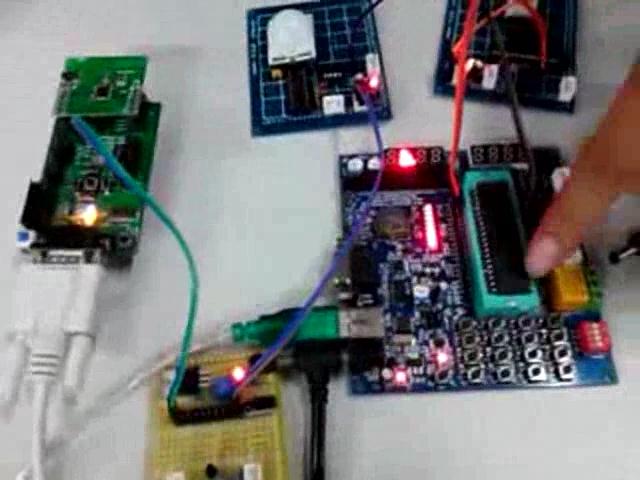
圖7為所開(kāi)發(fā)出的測(cè)試系統(tǒng)的實(shí)物展示圖。在圖7的中上部,左邊是協(xié)調(diào)器結(jié)點(diǎn)的LPC11C14板,右邊是協(xié)調(diào)器結(jié)點(diǎn)的CC2530板。在LPC11 C14板中,左邊帶有天線(xiàn)的部分是商品化的GPRS模塊。在CC2530板中,中上部帶有天線(xiàn)的部分是商品化的Zigbee射頻模塊。由于這兩部分的頻率均處于微波頻段,因此為保證可靠性采用商品化的成熟模塊。在圖7的中下部,左邊是路由器結(jié)點(diǎn),右邊是終端結(jié)點(diǎn)。為保證測(cè)試效果,這兩個(gè)結(jié)點(diǎn)在測(cè)試時(shí)均采用的是商品化的Zigbee模塊,測(cè)試通過(guò)后可將底板替換為自己開(kāi)發(fā)的底板(即:目前協(xié)調(diào)器結(jié)點(diǎn)中CC2530板所用的底板)。

為測(cè)試區(qū)域性Zigbee網(wǎng)絡(luò)軟、硬件設(shè)計(jì)的有效性,事先在LPC11C14板的嵌入式數(shù)據(jù)庫(kù)中存入如表1所示的測(cè)試數(shù)據(jù)。之后,利用手機(jī)發(fā)送短信向LPC11C14板的GPRS模塊提出停車(chē)請(qǐng)求。接下來(lái),LPC11C14運(yùn)行停車(chē)位尋優(yōu)算法。根據(jù)表1中的數(shù)據(jù),經(jīng)計(jì)算后得出結(jié)論:005號(hào)車(chē)位最佳。然后,LPC11C14的GPRS模塊向手機(jī)回復(fù)短信。短信的發(fā)送和接收界面如圖8所示。根據(jù)計(jì)時(shí)結(jié)果,從觸發(fā)短信發(fā)送按鈕到收到反饋的時(shí)間不超過(guò)10秒。
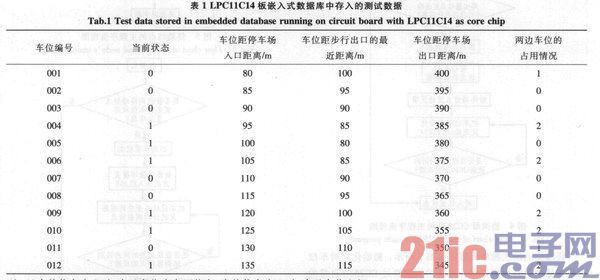
注:1)當(dāng)前狀態(tài)為0時(shí),表示車(chē)位為占用狀態(tài);當(dāng)前狀態(tài)為1時(shí),表示車(chē)位空閑。2)兩邊車(chē)位的占用情況為0時(shí),表示兩邊車(chē)位均未被占用;為1時(shí),表示有一邊被占用;為2時(shí),表示兩邊均被占用。
6 結(jié)論
以嵌入式芯片LPC11C14和Zigbee通信芯片CC2530為主要部件,設(shè)計(jì)了一套用于停車(chē)誘導(dǎo)的區(qū)域性Zigbee網(wǎng)絡(luò)的硬件電路,同時(shí)開(kāi)發(fā)了協(xié)調(diào)器、路由器和終端三類(lèi)節(jié)點(diǎn)的控制和通信程序。測(cè)試實(shí)驗(yàn)表明,所設(shè)計(jì)的Zigbee網(wǎng)絡(luò)可準(zhǔn)確接收用戶(hù)的停車(chē)請(qǐng)求,并能及時(shí)反饋?zhàn)罴衍?chē)位信息,從用戶(hù)請(qǐng)求到收到反饋的時(shí)間不超過(guò)10 s。





評(píng)論