基于CC2430的便攜式無線搜救器設(shè)計(jì)

隨著國家經(jīng)濟(jì)發(fā)展,對礦山及煤礦資源的依賴性也日益增大,因此而導(dǎo)致的礦山災(zāi)害也日益增多。在搶救遇難人員時(shí),方便,快捷,定位精確的搜救系統(tǒng)就顯得尤為重要,本文正是基于這一思想,利用無線射頻芯片自組網(wǎng)的特性,通過佩戴在遇難者身上不斷傳回的數(shù)據(jù)值,從而確定遇難者的所處位置,并迅速的進(jìn)行營救。
1 無線搜救器原理
無線搜救器系統(tǒng)的主要工作原理是在802.15.14/Zigbee 網(wǎng)絡(luò)中被稱為終端的射頻卡(佩戴在遇難人員身上)以一個(gè)固定的時(shí)間頻率往協(xié)調(diào)器(手持搜救器)發(fā)送數(shù)據(jù)幀,在該數(shù)據(jù)幀中包括一個(gè)接收信號強(qiáng)度值(RSSI),信號強(qiáng)度的衰減和距離成指數(shù)衰減的關(guān)系,兩者之間的關(guān)系為:
其中d 表示距離,n 為信號傳播常量,A 為每米信號接收強(qiáng)度,根據(jù)實(shí)驗(yàn)數(shù)據(jù)分析,n 值得最佳范圍為3.25-4.5,A 值得最佳范圍為45-49.對(1)式進(jìn)行等價(jià)變換,可得:
然后根據(jù)d 的變化便可以動(dòng)態(tài)的得知搜救器與終端之間的距離以及方位的變化。
2 系統(tǒng)總體設(shè)計(jì)
整個(gè)無線搜救器包括兩部分,一個(gè)是射頻卡終端,平常工作時(shí)做為人員考勤卡使用,災(zāi)難發(fā)生時(shí),具有定位遇難者位置的功能,主要芯片是CC2430.無線搜救器由三星公司的ARMS3C2440 和CC2430 構(gòu)成,主要功能為收集射頻卡終端發(fā)來的數(shù)據(jù)并進(jìn)行定位處理。
2.1 無線射頻終端
射頻卡終端選用TI 公司的CC2430 做為無線射頻芯片,該芯片是Chipcon 公司生產(chǎn)的首款符合802.15.14/Zigbee 技術(shù)的射頻系統(tǒng)單芯片。適用于各種ZigBee 或類似ZigBee 的無線網(wǎng)絡(luò)節(jié)點(diǎn),包括調(diào)諧器、路由器和終端設(shè)備。其具有非常顯著的低成本、低耗電、網(wǎng)絡(luò)節(jié)點(diǎn)多、傳輸距離遠(yuǎn)等優(yōu)勢,具有以下主要特點(diǎn):集成符合IEEE802.15.4 標(biāo)準(zhǔn)的RF 無線電收發(fā)機(jī);優(yōu)良的無線接收靈敏度和強(qiáng)大的抗干擾性;硬件支持CSMA/CA 功能;數(shù)字化的RSSI/LQI 支持。
CC2430 的硬件應(yīng)用電路如下圖所示,因?yàn)榭紤]到無線射頻終端每個(gè)員工都需佩戴一個(gè),從節(jié)約成本角度出發(fā),采取了一種簡單典型的設(shè)計(jì)方法,電路使用一個(gè)非平衡天線,連接非平衡變壓器可使天線性能更好。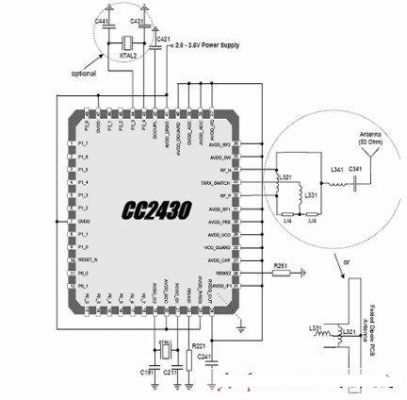
圖1 CC2430 電路應(yīng)用圖
電路中的非平衡變壓器由電容 C341 和電感 L341、L321、L331 以及一個(gè) PCB 微波傳輸線組成,整個(gè)結(jié)構(gòu)滿足RF 輸入/輸出匹配電阻(50Ω)的要求。內(nèi)部T/R 交換電路完成LNA 和PA 之間的交換。R221 和R261 為偏置電阻,電阻R221 主要用來為32 MHz的晶振提供一個(gè)合適的工作電流。用1 個(gè) 32 MHz 的石英諧振器(XTAL1)和2 個(gè)電容(C191 和C211)構(gòu)成一個(gè)32MHz 的晶振電路。用1 個(gè)32.768 kHz 的石英諧振器(XTAL2)和2 個(gè)電容(C441 和C431)構(gòu)成一個(gè)32.768 kHz 的晶振電路。電壓調(diào)節(jié)器為所有要求1.8V 電壓的引腳和內(nèi)部電源供電,C241 和 C421電容是去耦合電容,用來電源濾波,以提高芯片工作的穩(wěn)定性。
2.2 無線搜救器
無線搜救器由控制模塊、接收模塊、電源模塊、顯示模塊以及存儲模塊組成。控制模塊主要有三星公司的S3C2440 構(gòu)成,主要負(fù)責(zé)接收由射頻接收模塊發(fā)送過來的數(shù)據(jù)并對其進(jìn)行處理,提供實(shí)時(shí)時(shí)鐘及看門狗的功能。通過指示燈和蜂鳴器對搜救工作的狀態(tài)進(jìn)行指示。接收模塊由CC2430 構(gòu)成,主要負(fù)責(zé)接收無線射頻終端的數(shù)據(jù),802.15.14/Zigbee 協(xié)議處理以及執(zhí)行BI 和SI 的動(dòng)態(tài)調(diào)度算法。存儲模塊存儲各種與應(yīng)用相關(guān)的數(shù)據(jù),主要通過外部的RAM 和ROM擴(kuò)展來實(shí)現(xiàn)。電源模塊為盡量減少系統(tǒng)的功耗滿足電池供電的要求,在硬件設(shè)計(jì)中采用了低功耗的器件,如射頻芯片,RS-232 芯片,存儲芯片等都能在3.3V下正常工作。LCD 顯示模塊實(shí)時(shí)的將遇難者總數(shù),遇難者與搜救器之間的距離,遇難者的個(gè)人信息如ID 編號等顯示在LCD 顯示屏上。硬件連接框圖如下所示: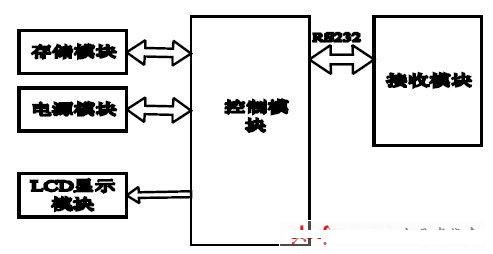
圖2 搜救器硬件框圖
2.3 系統(tǒng)軟件實(shí)現(xiàn)
無線搜救器系統(tǒng)分為無線搜救器和人員終端射頻卡兩部分,終端無線搜救器做為網(wǎng)絡(luò)中的協(xié)調(diào)器,負(fù)責(zé)建立一個(gè)信標(biāo)使能的網(wǎng)絡(luò),并允許有加入請求的終端射頻卡加入到網(wǎng)絡(luò)中來,當(dāng)加入成功后,便可進(jìn)行數(shù)據(jù)的傳送,軟件流程圖如圖3 所示。終端射頻卡在無災(zāi)難發(fā)生時(shí)作為考情卡使用,當(dāng)災(zāi)難發(fā)生時(shí)則作為定位卡使用,流程如圖4。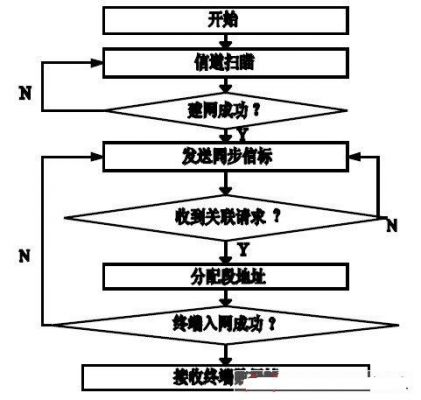
圖3 協(xié)調(diào)器流程圖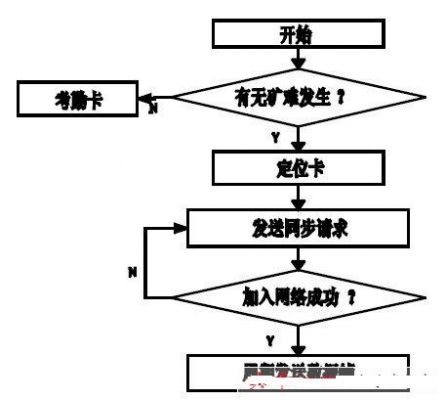
圖4 終端流程圖
2.4 BI 和SI 的動(dòng)態(tài)設(shè)定調(diào)度算法
無線搜救器在搜尋遇難者的時(shí)候需要收集大量的RSSI 值來進(jìn)行定位,這就意味著網(wǎng)絡(luò)的通信非常繁忙。
一般的網(wǎng)絡(luò)對于信標(biāo)間隔(BI)和超幀活動(dòng)區(qū)間(SD)都是設(shè)定為定值的,但是在通信繁忙的時(shí)候協(xié)調(diào)器或路由器就有可能因?yàn)槠鋫鬏數(shù)臄?shù)據(jù)量大,而其超幀活動(dòng)區(qū)間又比較小,有可能引發(fā)數(shù)據(jù)包丟失等情況,從而成為網(wǎng)絡(luò)數(shù)據(jù)傳輸?shù)钠款i。本系統(tǒng)從實(shí)際實(shí)驗(yàn)出發(fā),采取了一種動(dòng)態(tài)設(shè)定BI 和SI 的方法,流程如圖5 所示。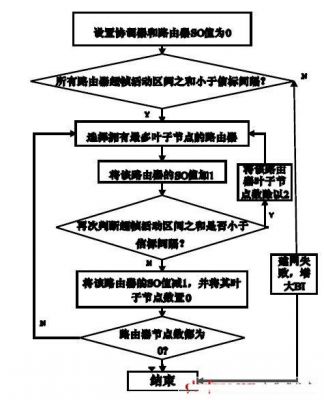
圖5 算法流程圖
3 實(shí)驗(yàn)結(jié)果分析
在Zigbee 網(wǎng)絡(luò)的幾種拓?fù)浣Y(jié)構(gòu)中,簇-樹狀拓?fù)渚哂薪ňW(wǎng)迅速,節(jié)點(diǎn)加入網(wǎng)絡(luò)成功率高以級路由途徑多等特點(diǎn),并且具有網(wǎng)絡(luò)自愈功能,且因路由器具有數(shù)據(jù)轉(zhuǎn)發(fā)能力,可實(shí)現(xiàn)更大數(shù)據(jù)量的傳輸,所以在實(shí)驗(yàn)中,我們將射頻卡的類型全部設(shè)置為路由器,拓?fù)浣Y(jié)構(gòu)為簇-樹狀拓?fù)洹Mㄟ^Packet Sniffer CC2430IEEE802.15.14 軟件跟蹤的數(shù)據(jù)幀中每幀字節(jié)數(shù)計(jì)算出在每個(gè)超幀活動(dòng)區(qū)間內(nèi)終端傳輸?shù)臄?shù)據(jù)量,下面是BO 和SO 為定值與動(dòng)態(tài)設(shè)定BO 和SO 值兩種情況下的數(shù)據(jù)傳輸量的對比:
表1 傳輸數(shù)據(jù)對比表
由表1 可知,在動(dòng)態(tài)設(shè)定BO 和SO 值時(shí),可顯著增大傳輸數(shù)量,從而大大增加定位時(shí)的精度和搜救器的靈敏度。
在采取動(dòng)態(tài)設(shè)定BO,SO 值方法時(shí),對無線搜救系統(tǒng)的精度和靈敏度進(jìn)行實(shí)驗(yàn)可得:當(dāng)無線搜救器距離終端射頻卡45 米左右便可搜索到終端卡的信號,此時(shí)定位誤差在3 米以內(nèi),隨著兩者之間距離的接近,定位誤差相應(yīng)減少,在20 米左右定位誤差可控制在1米以內(nèi),考慮到這是在實(shí)驗(yàn)狀態(tài)下得出的結(jié)論,在實(shí)際應(yīng)用中因各種環(huán)境的干擾,靈敏度與定位精度都會有所下降,但是一般礦山中的甬道的長度大部分都是在10 多米左右,定位誤差在0.7 米左右。綜合以上實(shí)驗(yàn)數(shù)據(jù),該無線搜救器系統(tǒng)是可以滿足實(shí)際工程當(dāng)中的應(yīng)用的。
4 結(jié)語
通過采集各個(gè)射頻終端卡的RSSI 值,實(shí)現(xiàn)了定位和搜救功能,并利用動(dòng)態(tài)設(shè)置BO,SO 的方法,創(chuàng)新性的運(yùn)用到無線搜救領(lǐng)域,最優(yōu)化了信標(biāo)間隔,解決了數(shù)據(jù)傳輸瓶頸的問題,從而間接的提高了定位的精度和靈敏度。在此設(shè)計(jì)基礎(chǔ)上,定位的精度和節(jié)點(diǎn)穿透能力還需要做進(jìn)一步的完善和研究。

評論