基于STC89C52單片機(jī)的智能小車的設(shè)計(jì)

1.3 遙控系統(tǒng)
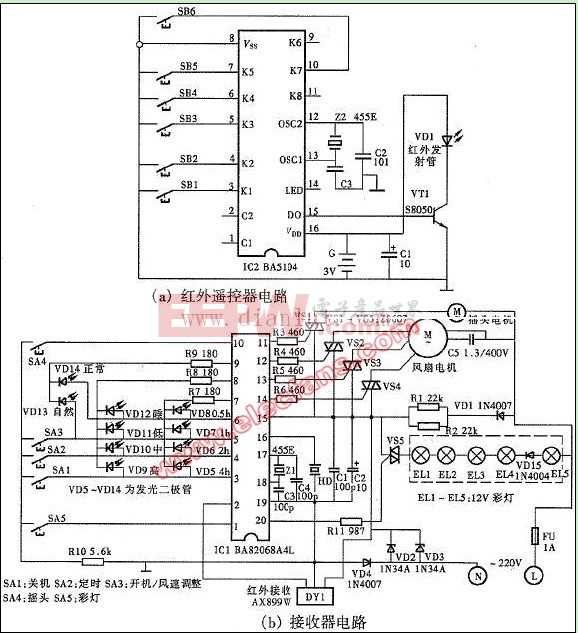
本文引用地址:http://www.104case.com/article/201610/309907.htm紅外遙控系統(tǒng)主要由遙控發(fā)射器、紅外接收器兩部分組成。紅外遙控器產(chǎn)生遙控編碼脈沖,驅(qū)動(dòng)紅外發(fā)射管輸出紅外遙控信號(hào),遙控接收器接收發(fā)射器發(fā)出的紅外信號(hào),并完成對(duì)信號(hào)的放大、檢波、整形、解調(diào)出遙控編碼脈沖,輸入到單片機(jī),完成對(duì)遙控指令解碼,并執(zhí)行相應(yīng)的遙控功能。如圖3,接收器選用VS1838B,out是解調(diào)信號(hào)輸出端,直接與單片機(jī)相連。利用紅外遙控可代替手動(dòng)開(kāi)關(guān)控制小車的啟動(dòng)、停止、左轉(zhuǎn)、右轉(zhuǎn)、前進(jìn)、后退等功能。
1.4 尋跡系統(tǒng)
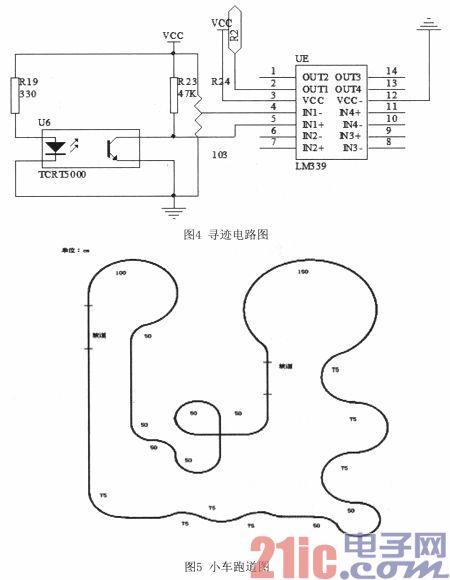
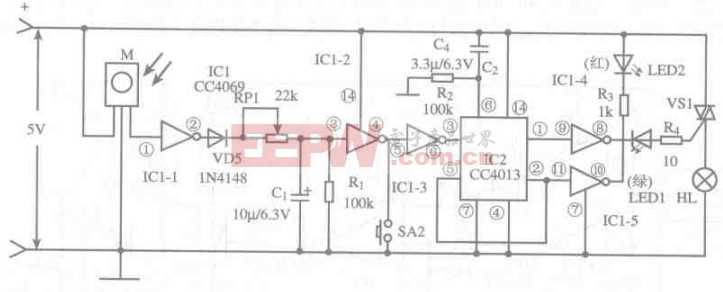
在智能車系統(tǒng)中,紅外發(fā)射管發(fā)射紅外線,當(dāng)紅外線照射到白色地面時(shí)會(huì)有較大的反射,紅外接收管接收到反射回的紅外線強(qiáng)度就較大;如果紅外線照射到黑色標(biāo)志線,黑色標(biāo)志線會(huì)吸收大部分紅外光,紅外接收管接收到的紅外線強(qiáng)度就很弱。這樣,利用紅外光電傳感器檢測(cè)智能車行駛道路上的黑色標(biāo)志線,就可以實(shí)現(xiàn)智能車的智能尋跡。本智能小車探測(cè)的傳感器選用TCRT5000反射紅外傳感器,該傳感器封裝形狀規(guī)則,便于安裝。如圖4,在使用約40mA的發(fā)射電流,沒(méi)有強(qiáng)烈日光干擾(在有日光燈的房間里)探測(cè)距離能達(dá)8cm,完全能滿足探測(cè)距離要求。這是一種自帶發(fā)光二極管和光敏三極管的器件,當(dāng)檢測(cè)到黑線時(shí),由于反射率不高,三極管截止而輸出高電平。當(dāng)檢測(cè)到白色地面時(shí),由于反射率較高,三極管飽和而輸出低電平,從而實(shí)現(xiàn)了黑線的檢測(cè)。
1.5 避障系統(tǒng)
本設(shè)計(jì)采用超聲波測(cè)距。超聲波頻率高、波長(zhǎng)短、定向性好、能量集中,適合于距離測(cè)量,且不易受光線干擾,提高了系統(tǒng)的可靠性,另外,還可以對(duì)障礙物的位置進(jìn)行定位。通過(guò)超聲波發(fā)射裝置發(fā)出超聲波,在發(fā)射時(shí)刻的同時(shí)開(kāi)始計(jì)時(shí),超聲波在傳播途中碰到障礙物就立即返回,超聲波接收器收到反射波立即停止計(jì)時(shí),根據(jù)時(shí)間差就可以知道距離了,這就是時(shí)間測(cè)距法(超聲波在空氣中的傳播速度為340m/s根據(jù)計(jì)時(shí)器記錄的時(shí)間t,就可以計(jì)算出發(fā)射點(diǎn)距障礙物的距離s,即:s=340t/2)。超聲波傳感器為非接觸式傳感器,HC-SR04傳感器測(cè)量距離為2~400cm,測(cè)量精度為3mm。避障系統(tǒng)包括:超聲波發(fā)射器、接收器與控制電路。
1.6 顯示系統(tǒng)
本設(shè)計(jì)采用1602液晶顯示,也叫1602字符型液晶,它是一種專門用來(lái)顯示字母、數(shù)字、符號(hào)等的點(diǎn)陣型液晶模塊,它有若干個(gè)5×7或者5×11等點(diǎn)陣字符位組成,每個(gè)點(diǎn)陣字符位都可以顯示一個(gè)字符。它具有功耗低、壽命長(zhǎng)、顯示內(nèi)容多的特點(diǎn),可以直接接單片機(jī)數(shù)據(jù)端使用。
1.7 小車供電系統(tǒng)
小車供電系統(tǒng)有兩路:一路是VSS直流減速電機(jī)供電電源,由兩塊3.7V電壓1200mAh容量的手機(jī)鋰電池串聯(lián)而成,電壓在7.4V左右;另一路是VCC電路板供電電源,由VSS電源經(jīng)穩(wěn)壓芯片7805輸出5V的電壓,為傳感器和控制板供電。
2 智能小車軟件系統(tǒng)設(shè)計(jì)
設(shè)計(jì)中的應(yīng)用軟件包括:硬件電路設(shè)計(jì)軟件、程序設(shè)計(jì)軟件和服務(wù)軟件。
本設(shè)計(jì)使用Protel 99SE軟件,繪制原理圖,并生成PCB電路板,完成硬件電路軟件設(shè)計(jì);采用混合編程的方法,即高級(jí)語(yǔ)言C編寫主程序,用匯編編寫硬件有關(guān)的程序,編寫源程序,并生成hex格式文件,完成程序軟件設(shè)計(jì),程序流程圖如圖6所示;還使用了STC-ISP-V4.83程序燒錄軟件和USB轉(zhuǎn)串口驅(qū)動(dòng)軟件等服務(wù)軟件。
3 結(jié)論
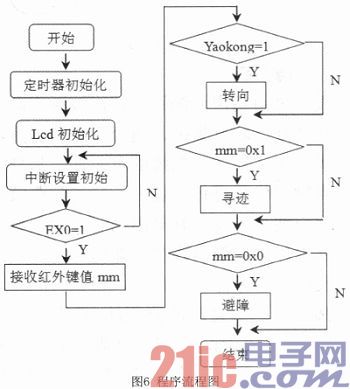
智能小車,行駛的不是凝固的軌跡,而是踐行著流動(dòng)的思想。所謂智能就是將思想賦予機(jī)器,使之完成既定的任務(wù)。本次設(shè)計(jì)智能小車實(shí)現(xiàn)了如下功能:智能小車按下電源開(kāi)關(guān),1602液晶顯示“zhineng che”并停在原地,然后可以在遙控的控制下進(jìn)行前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)、剎停等運(yùn)轉(zhuǎn),并且可以進(jìn)行尋跡模式和避障模式的切換。尋跡模式下小車可以在做好的跑道上,沿紅外線傳感器感應(yīng)到1.5cm寬的黑色引導(dǎo)線,沿線前進(jìn)并轉(zhuǎn)彎,并在終點(diǎn)線停止前進(jìn)。在避障模式下小車可以經(jīng)過(guò)超聲波傳感器測(cè)量出障礙物距離,并在10cm處做出反應(yīng),左轉(zhuǎn)躲避障礙物。



評(píng)論