基于顏色識別的智能小車集群控制

小車在防碰撞過程中若出現(xiàn)全部車輛停止(即進(jìn)入鎖死狀態(tài)),則啟動應(yīng)急預(yù)案,使邊緣小車在原地向鎖死反方向轉(zhuǎn)動相應(yīng)的角度,并行走一段距離,以解除鎖死狀態(tài)。
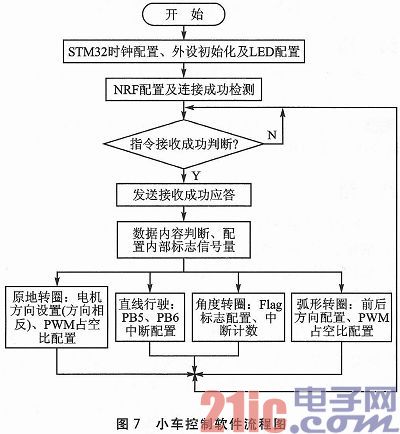
本文引用地址:http://www.104case.com/article/201610/309878.htm3.4 小車控制軟件流程圖
小車控制軟件流程圖如圖7所示。
4 整體性能測試
為防止因環(huán)境顏色和光照的影響,測試場地為一塊2 m×3 m的長方形布料,剛好是攝像頭的拍攝范圍。
①小車測試。通過直線行駛指令,將小車放在測試場地中,使小車直線行駛一段距離。小車將獲得兩個不同的PWM信號占空比,作為下一次啟動時的配置參數(shù)。
②小車頂部色盤像素的采集。為消除因光照強(qiáng)度所引起的顏色誤差,需先將與小車頂部色盤相同顏色的紙片放在場地中間,攝像頭將采集這一坐標(biāo)的像素值作為參考值,用于實際測試過程中的顏色識別與定位。
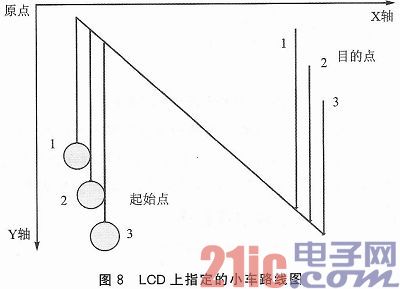
③為小車設(shè)置起跑路線圖。通過LCD屏,在上面為小車指定運(yùn)動的路線圖,其后小車將按照設(shè)定的軌跡行走。行駛過程中小車很好地實現(xiàn)了集群之間防碰撞的功能。
小車路線圖如圖8所示。
結(jié)語
基于顏色識別的集群控制系統(tǒng),可以通過顏色的采集來實現(xiàn)定位,是自動控制和人工智能方面的一種可行方式,具有運(yùn)行穩(wěn)定、使用方便的優(yōu)點(diǎn)。而多控制對象的集群控制理論的研究,使得多目標(biāo)協(xié)同工作成為可能。基于此模式的智能控制設(shè)備具有廣闊的應(yīng)用前景。











評論