基于MSK4226的直流有刷電機四象限控制

摘要:在設計中使用MSP430F169單片機提供控制電機需要的PWM信號,通過電機驅動芯片MSK4226實現直流電機的四象限運行;驅動芯片上的電流測量環節保證電機運動中不發生堵轉;最后比較了電機直接啟動與四象限控制中的響應速度與達到穩態的時間。
本文引用地址:http://www.104case.com/article/201610/307523.htm0 引言
本文主要介紹了一種直流電機的四象限控制器。控制器以單片機MSP430F169作為控制核心,利用單片機的PWM功能,可發生多通道占空比可調的PWM信號;PWM信號通過電機驅動芯片MSK4226將電機兩端的電壓調制成頻率一定、寬度可變的脈沖電壓序列,控制電機轉速與轉向;單片機實時監測驅動芯片上的電機電流,發生過流時采取保護;在文章的最后比較了電機四象限控制與單像控制,總結出了四象限控制的優缺點。
1 控制原理及方法
1.1 PWM控制原理
直流電動具有慣性環節,直流電機的數學模型相當于一個電阻和電感串聯而成,而沖量相等而形狀不同的窄脈_加在具有慣性的環節上時,其效果基本相同。沖量指窄脈_的面積,效果基本相同是指環節的輸出響應波形基本相同。
PWM(脈沖寬度調制)控制通過對一系列脈沖的寬度進行調制,來等效地獲得所需要的波形(含形狀和幅值)。
PWM調速是利用PWM調制的方法,將恒定的直流電源電壓調制成頻率一定、寬度可變的脈沖電壓序列,根據沖量相同的原則來改變平均輸出電壓的大小,以調節電機的轉速。
1.2 四象限控制
電機的單象限控制只能運行在電動運轉狀態下,能量只能單向流動。而電機的四象限控制電機能運行在電動與發電狀態下,能量可雙向流動。電機的四象限運動分別為正向電動、回饋發電制動、反接制動、反向電動狀態。如圖1所示,以電機的轉速為縱坐標,以轉矩為橫坐標建立的直角坐標系描述的電機四種運行狀態。
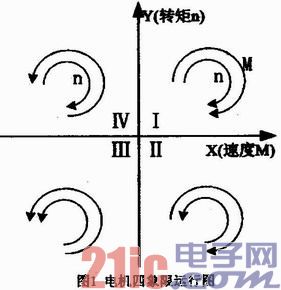
為了實現電機在四象限內運行和切換,采用了雙極式PWM變換器。雙極式PWM變換器調節占空比來控制能量的流動大小與方向,占空比> 50%,50%或等于50%分別實現I象限、II象限、III和Ⅳ象限電機運動。
2 控制系統
硬件控制系統主要包括核心控制器、電機驅動模塊及電機過流保護模塊。
2.1 PWM信號的發生
控制系統中,核心控制器采用TI公司生產的MSP430F169單片機,該單片機具有兩個16位定時器A和B,利用定時器的捕獲、比較功能實現PWM信號發生。
本文中需要兩路頻率在1~2kHZ之間、占空比可調的PWM信號。首先選擇定時器A的時鐘為輔助時鐘并清除定時器,輔助時鐘頻率為32.76 8kHz;在定時器的捕獲比較寄存器0中調整PWM信號的周期;在獲比較寄存器1與2的值可分別調整兩路PWM信號的占空比;工作模式設置為PWM復位置位模式;計數器為增計數模式;設置端口P1.2、P1.3為PWM輸出端口。
2.2 電機驅動模塊
本設計中PWM信號的功率放大主要通過功率模塊MSK4226實現。MSK4226內部集成了功率場效應管H橋,H橋自舉驅動與控制電路。H橋場效應管具有低的導通電阻(典型值0.013 Ω),最大75V的電源母線電壓,20A連續電流,可滿足系統功率要求。H橋自舉驅動與控制電路包括H橋高低端場效應管驅動、死區時間產生、直通保護及H橋關斷等電路。
2.3 控制電路
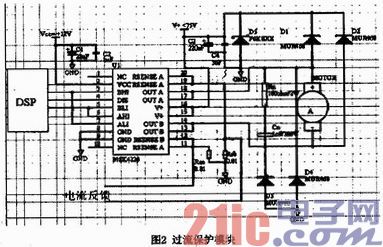
在本系統的雙極性PWM模式下,V1、V4開關管控制端AHI與BLI并聯,V2、V2開關管控制端ALI和BHI并聯;MSP430F169單片機的端口P1.2 P1.3產生的兩路PWM信號控制這兩個并聯端。來自單片機的關斷信號接入驅動芯片的關斷使能端DIS。功率肖特基二極管D1~D4分別反向并接在V1~V4上,當負載向電源反饋能量時起保護功率管的作用,其反向耐電壓應大于電源電壓,反向恢復時間10ns左右。電阻R1與電容C1構成緩沖網絡,用于抑制尖峰電壓。對于某些感性負載,可能導致MSK4226近似100ns數安培的直通現象。反向并接RSENSEA與地之間,RSENSEB與地之間的功率肖特基二極管用于抑制這種現象。
2.4 過流保護模塊
如圖2所示,在MSK4226的RSENSEA與RSENSEB引腳對地接0.01 Ω無感電阻,電機電流流過電阻,在電阻兩端電流取樣。取樣的電壓值經過運算放大器放大后,AD采樣后傳輸給單片機作為判斷電機是否堵轉的依據。
3 電機四象限控制
3.1 第I象限工作-正轉電動運行控制
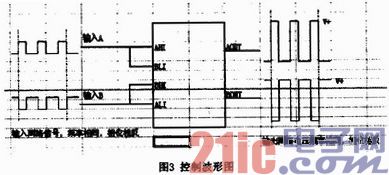
在AHI與BLI、ALI和BHI并聯的控制端輸入3.3~5V、開關頻率小于200kHz的邏輯電平信號,兩路信號的頻率相同,相位相反。
當AHI與BLI端口輸入信號的占空比50%,而ALI和BHI端口信號的占空比>50%時,MSK4226模塊的OUTA端口的電壓大于OUTB端口,電機正向轉動。AHI與BLI端口信號占空比為零,ALI和BHI端口信號占空比為100%時達到正向轉動最大速度。如圖為AHI與BLI端信號占空比30%,AHI與BLI端信號占空比70%的控制波形圖3。
3.2 第II、IV象限工作-電機制動控制
當AHI與BLI、ALI和BHI端口輸入信號的占空比都為50%時,OUTA和OUTB端口輸出電壓占空比為50%,電機處于制動狀態,電機停轉。制動狀態不等于停機,此時電樞兩端的瞬時電壓和瞬時電流都不為零,而是交變的。控制電機停機可使能驅動模塊的DIS引腳。
3.3 第III象限工作-正轉電動運行控制
AHI與BLI端口輸入信號的占空比>50%,而ALI和BHI端口信號的占空比50%時,MSK4226模塊的OUTB端口的電壓大于OUTA端口,電機負向轉動。AHI與BLI端口信號占空比為100%,ALI和BHI端口信號占空比為零時達到負向轉動最大速度。
4 結束語
文章中利用MSK4226模塊達到直流電機四象限運動控制。在電機的四象限控制中電機制動時,電機處于高頻振動,起著“動力潤滑”的作用,消除正反向啟動時的靜摩擦死區,所以電機啟動、運行過程中電流比較連續、啟動時間短、響應速度快。










評論