基于ARM的全數字雙閉環無刷直流電動機控制系統設計

傳統的直流電機具有運行效率高、調速性能好等諸多優點因而在工業傳動中占據著重要的地位,但其本身固有的機械換相器和電刷導致了電機容量有限、噪音大、容易產生火花和可靠性差等缺點。隨著計算機技術和微電子技術的發展,無刷直流電動機用位置傳感器和電子換相器取代了有刷直流電動機的電刷和機械換向器,同時很好的保持了傳統直流電機的優點且具有比有刷直流電機更高的運行效率。因此直流無刷電機一經產生就在工業生產中取得了廣泛的應用,尤其在節能減排已成為時代主題的今天,無刷直流電機高效率的特點更顯示了其巨大的應用價值。
本文引用地址:http://www.104case.com/article/201610/306664.htm1 全數字雙閉環直流調速系統簡介
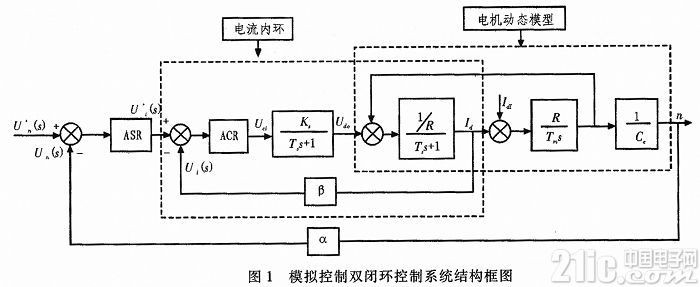
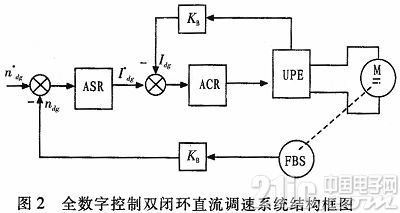
在穩態的情況下,直流電動機僅僅采用單閉環轉速PI調節就可以在保證直流調速非常系統穩定的前提下實現轉速沒有靜差,即輸出完全跟隨輸入。但在快速起制動、抗干擾能力強等控制系統對動態性能要求較高時,因電動機在單閉環系統中電流和轉矩的動態過程不能得到及時有效的控制,因而需在控制系統中設置一個電流調節環用于調節電流。所以控制系統中有轉速調節環、電流調節環兩個調節環,且這兩個調節環之間實行嵌套連接。圖1及圖2分別為模擬控制與全數字控制下雙閉環控制系統的結構框圖和雙閉環直流調速系統結構框圖。
2 控制系統整體構成
全數字雙閉環無刷直流電動機控制系統主要由ARM嵌入式處理器、LCD觸摸屏、光電耦合電路、驅動電路、逆變電路、電流檢測電路、直流無刷電機位置信號檢測環節以及控制電路組成。
本設計中的ARM處理器為其內核為Atmel公司的ARM9系列32位CPU AT91SAM9261S,它采用5級整數流水線,主頻最高可達300MIPS,支持Windows CE、Linux、Palm OS等多種主流嵌入式操作系統,在工業控制、檢測設備和儀器儀表等需要高速數字信號處理的場合運用非常廣泛。
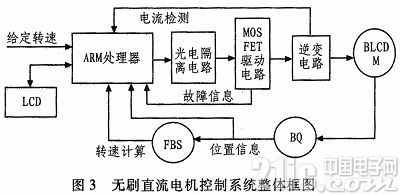
無刷直流電機控制系統整體框圖如圖3所示。當系統處在運行狀態時,通過電阻給定轉速信號,并經觸摸屏實時顯示及P、I參數設定,發出運行指令(如起動、正轉、制動)。根據霍爾傳感器檢測到的電機位置信號控制換相,并計算電動機的轉速來改變控制器的輸出信號,從而調整電機的運行狀態。電流檢測環節主要是實現轉速、電流雙閉環控制和過流保護,從外部檢測到的電流信號經過采樣后,經放大、濾波送到A/D轉換器進行模數轉換,控制單元根據檢測到的電流大小來調整電流調節器的輸出。當出現過流故障時,電流檢測電路會發出故障指示信號,送入ARM處理器進行處理。
3 硬件各模塊設計
3.1 光耦隔離電路
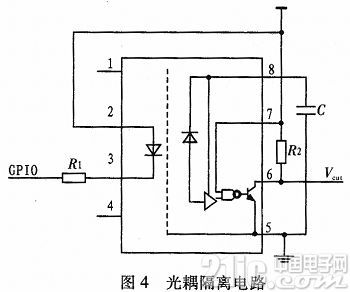
控制信號一般為10~20 kHz左右的PWM波,為了減少電磁干擾對ARM處理器的影響,需采用高速光耦進行隔離、整形和電平轉換。本設計采用6N137光耦,開關時間最大75 ns,光耦隔離電路如圖4所示。
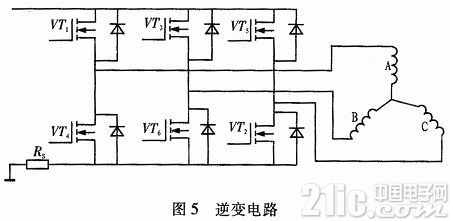
3.2 逆變電路
功率逆變電路采用三相星形全橋逆變電路,如圖5所示。由6只IRF530N MOOSFET構成三相逆變橋,其中每只MOSFET功率管兩端反并聯一只二極管,用于續流和緩沖。低側三只MOSFET管并聯后串接一個小電阻Rs用作電流采樣。
3.3 位置及速度檢測
本設計中直流無刷電機位置信號的檢測采用霍爾位置傳感器,即無刷直流電動機自帶的位置傳感器,其輸出側通常采用漏極開路,所以必須在它的輸出上接上相應的上拉電阻。
根據式1計算出兩次換相間隔期間的平均角速度,然后在軟件程序中換算成r/min,或直接根據△t計算出多少r/min。
△t一般較小,可以通過采樣對PWM波計數的方式來確定△t。
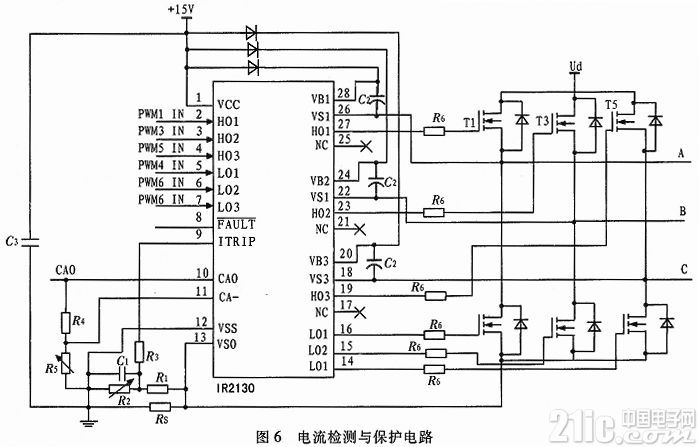
3.4 電流檢測與保護電路
電流檢測與保護電路如圖6所示。IR2130帶有電流電流放大器和過流輸入保護環節,可以對電流采集信號進行放大。當過電流發生時,送到過電流檢測引腳的電壓高于0.5 V,此時R2130內部的過電流比較器迅速翻轉,邏輯故障處理單元輸出低電平,六路輸入信號被鎖存,![]() 管腳輸出故障指示,故障時輸出為低電平,六路輸出驅動信號全為低電平,功率管進入全關斷狀態,使器件得到保護。欠壓保護的工作過程與過流保護的工作過程類似。
管腳輸出故障指示,故障時輸出為低電平,六路輸出驅動信號全為低電平,功率管進入全關斷狀態,使器件得到保護。欠壓保護的工作過程與過流保護的工作過程類似。
4 控制系統軟件設計
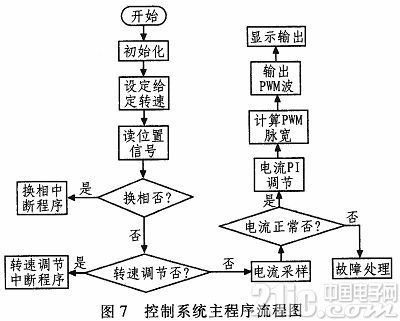
電機換相控制程序砑有2種設計方法,電機轉速不高和電機轉速較高。當電機轉速不高時,換相周期較長,PWM周期遠高于電機換相周期,這樣可在每一個PWM周期對霍爾信號輸入進行查詢,判斷是否需要換相,并設定一個計數器記錄兩次換相期間的PWM周期數用于計算轉速。當電機轉速較高時,兩次換相期間相隔PWM周期數不多,查詢換相的方法會導致換相不及時且影響轉速計算精度,需通過中斷的方法進行換相,在需要速度調節時直接通過中斷接口函數讀取速度值。在應用程序中加入中斷響應事件消息響應函數,若中斷發生,則進入中斷子程序并設置相應故障參數。控制系統主程序流程圖如圖7所示。
5 結束語
無刷直流電動機用位置傳感器和電子換相器取代了電刷和機械換向器,有效降低了噪音,避免了火花的產生,提高了控制系統可靠性。本設計對全數字雙閉環無刷直流電動機的控制系統的軟、硬件都做了詳細介紹,以ARM為主處理器使得整個系統的運行效率更高、性能更穩定。實驗室模擬結果表明,該系統具有較好的控制可靠性、良好的動態性能及系統穩定性。









評論