感應電機DTC系統減小啟動電流策略

摘要 針對感應電機直接轉矩控制(DTC)系統啟動電流過大的問題。提出一種將直流預勵磁措施應用于DTC中的方法,即在零電壓矢量和某一固定有效電壓矢量之間進行切換,當電流超過設定值時就切換到零電壓矢量。仿真和實驗結果表明,該方法能有效減小啟動電流,增大啟動轉矩,改善了DTC的性能。
本文引用地址:http://www.104case.com/article/201610/306611.htm感應電機直接轉矩控制(DTC)因其無需旋轉坐標變換,具有結構簡單、魯棒性強、動態性能好等優點。引起了國內外眾多學者的廣泛關注,目前已發展成為和矢量控制(VC)并駕齊驅的一種高性能電機控制策略。
各種DTC的改進控制方法均致力于改善其低速和穩態性能,減小磁鏈和轉矩脈動。而盡量減小DTC啟動時的過大電流,也是DTC研究中需注意的問題。本文提出一種直流預勵磁的方法應用于DTC策略中,即在零電壓矢量和某一固定有效電壓矢量之間進行切換,當電流超過設定值時即切換到零電壓矢量,有效解決了啟動電流過大的問題。
1 感應電機數學模型
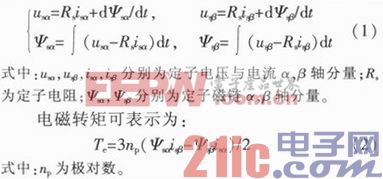
在α-β靜止坐標系中,使用定子和轉子磁鏈矢量作為狀態變量的感應電機方程為
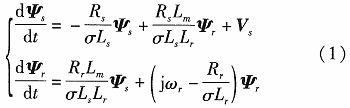
式中,ψs和ψr為定子和轉子的磁鏈矢量;Vs為定子電壓矢量;ωr為轉子的電角速度;Ls和Lr為定子和轉子的自感;Lm為互感;Rs和Rr為定子和轉子的電阻。
電磁轉矩可使用定子和轉子磁鏈矢量的叉積表示為
式中,Np為電機的極對數;
為漏感系數;δsr為負載角。
假如控制定子磁鏈變化的速度遠大于轉子的時間常數,可認為在這段時間內轉子磁鏈恒定,所以只要控制定子磁鏈幅值不變,通過改變δsr便可快速控制電磁轉矩。
2 感應電機直接轉矩控制
2.1 空間電壓矢量的形成
直接轉矩控制的實現建立在空間電壓矢量基礎上,圍繞電機的磁鏈和轉矩進行直接控制,因此先介紹空間電壓矢量的形成。
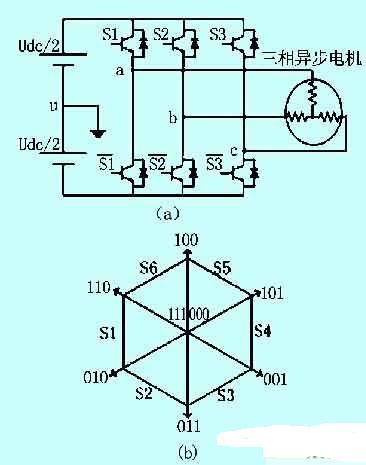
圖1是電壓源型逆變器(VSI)的示意圖,其中uDC為逆變器輸入側的直流母線電壓。逆變器每個橋臂的上下兩個開關信號是互補的,即當T1管有門極驅動信號導通時,電機A相電壓uAN=(2/3)uDC,當T4管有門極驅動信號導通時,電機A相電壓uAN=0。
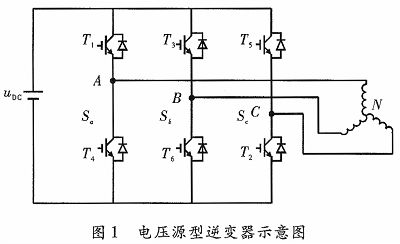
若用3個開關信號Sa、Sb、Sc來表征逆變器中全部6個開關器件的通斷狀態,且設當某相開關信號為1時,表示該相上橋臂的器件導通,為0時表示下橋臂的器件導通,可得用開關狀態表示的逆變器輸出電壓空間矢量Vs(Sa、Sb、Sc)。共有6個有效電壓矢量 V1(100),V2(110),V3(010),V4(011),V5(001),V6(101)和2個零電壓矢量V0(000),V7(11 1)。
對于上述8種逆變器的開關狀態,就形成了8種逆變器輸出電壓。假設電機A相電壓uAN單獨作用時形成的空間電壓矢量位于定子三相坐標系A軸上,則不同開關狀態下逆變器輸出的空間電壓矢量Vs可表示為
式中,Vs為空間電壓矢量;uDC為直流母線電壓;Sa、Sb、Sc為三相逆變器的開關狀態。
2.2 直接轉矩控制原理
兩電平電壓源逆變器的輸出只有8種電壓矢量,包括6個有效電壓矢量(V1~V6)和2個零電壓矢量(V0,V7)。根據有效電壓矢量的位置,坐標平面分為6個扇區,如圖2所示。
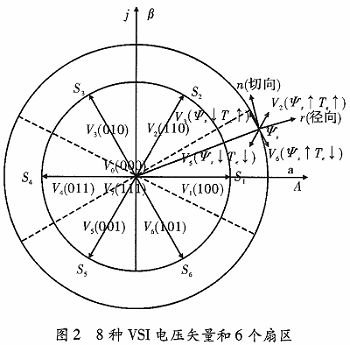
假定定子磁鏈矢量落在第1扇區,轉速為逆時針方向。應用電壓矢量V2、V3可增大轉矩,而使用V5、V6可迅速減小轉矩。同理,應用V2、V6可增大磁鏈幅值,而使用V3、V5則減小磁鏈幅值。當V0或V7作用時,定子磁鏈幅值保持不變,轉矩將減小。
2.3 減小啟動電流方法
由于電機在啟動時磁通尚未建立,若直接啟動電機可能會造成啟動電流過大引起裝置保護。實際應用時可采取預勵磁措施先讓電機內部建立起磁通再啟動。預勵磁的方法為直流預勵磁,即在零電壓矢量和某一固定有效電壓矢量之間進行切換,當電流超過設定值時就切換到零電壓矢量,使用該方法可在增大啟動轉矩的同時有效減小啟動電流。
3 仿真和實驗結果
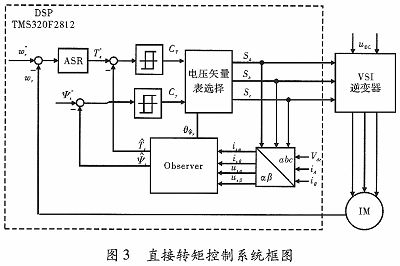
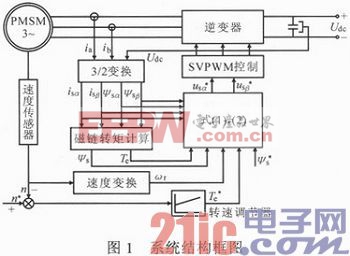
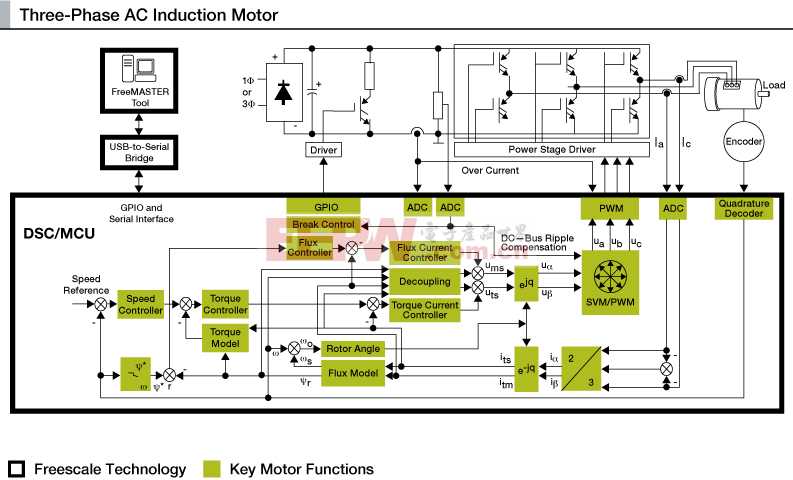
實驗系統控制板采用(TMS320F2812)DSP芯片,主開關器件選用2SK1941,逆變器PWM開關頻率為30 kHz。系統的外環使用PI速度控制器產生轉矩參考值,控制系統框圖如圖3所示。異步電機和控制系統參數為:采樣頻率fs=10 kHz;Pn=2.2 kW;Un=380 V;fn=50 Hz;Np=2;Rs=2.99 Ω;Rr=1.468 Ω;Lm=0.221 H;Lls=Llr=9.05 mH。
3.1 仿真結果
在Matlab/Simulink中對直接啟動和預勵磁啟動進行比較研究,圖4是電機從靜止啟動到900 r/min和0.3 s時突加7 N·m負載的仿真波形。
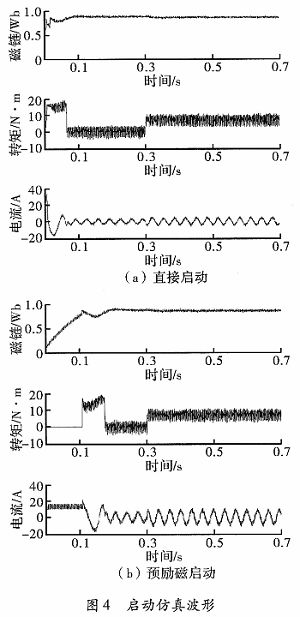
如圖4所示,電機以最大轉矩14 N·m啟動,當轉速到達給定轉速后,轉矩迅速變為0 N·m,而后在0.3 s負載轉矩從0突增至7 N·m,轉矩迅速響應了負載的變化,說明DTC的動態響應迅速。由于采用預勵磁措施,啟動電流大幅減小,峰值不超過10 A,如圖4(b)所示,而直接啟動電流接近35 A,如圖4(a)所示。
3.2 實驗結果
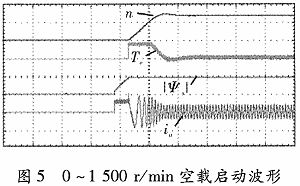
圖5給出了新DTC方法在空載時從靜止到1 500 r/min的啟動波形,通過對PI速度控制器進行限幅,電機快速達到額定轉速,證實DTC方法動態響應迅速的優點。另外,從圖5還可看出采用預勵磁措施后,啟動電流峰值不超過10 A,與仿真結果一致。
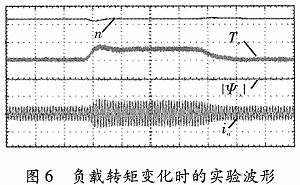
考察DTC系統對負載變化的抗干擾能力,進行了突加、減載實驗如圖6所示。可看出輸出轉矩響應迅速,系統對外部負載轉矩表現出良好的抗干擾能力。由于實驗機組通過磁粉制動器加載,直接斷電后并不能立即卸去全部負載,所以圖6中的輸出轉矩在加、減載時的響應略有區別,主要表現在減載時轉速變化較小,轉矩并未像突加負載時快速變化。
4 結束語
針對感應電機DTC系統啟動電流過大的問題,將一種直流預勵磁的方法應用于DTC策略中。該方法在減小啟動電流的同時,增大了啟動轉矩,改善了DTC的性能。

評論