基于ARM的危險品搬運機器人的設計與實現

3.2 客戶端軟件設計
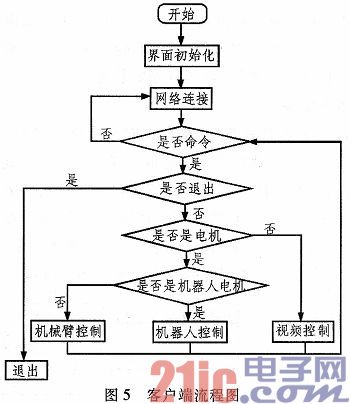
客戶端軟件流程圖如圖5所示,首先進入界面初始化,進入網絡連接,等待是否有命令,如果沒有命令,返回網絡連接繼續等待,如果接收到命令,判斷是否為退出,如果是則退出,如果不是查看是否為電機命令,如果為否則是執行視頻監控,如果為是判斷是否為機器人電機,如果是,則執行機器人控制,不是執行機械臂。
4 系統測試方案
將系統的電機驅動模塊、機械臂驅動模塊分開測試,調通后再進行整機調試,提高調試效率。
1)電機驅動模塊
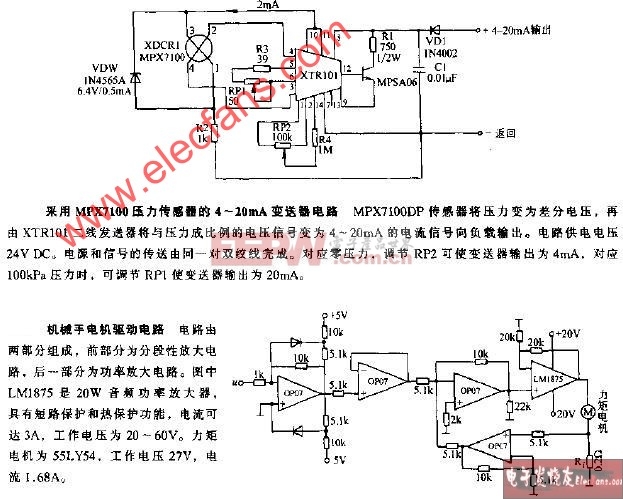
首先測試電機控制是否有效。分別給電機一個正轉信號和反轉信號,觀察電機的轉向是否正確,如轉動正確,說明電平控制有效。然后通過改變PWM脈沖的占空比對電機的轉速進行調節。調節信號發生器輸出方波的占空比,觀察電機轉速是否滿足,占空比減小則電機減速,占空比增大則電機加速的關系,如果滿足上述關系,則說明能夠通過改變PWM脈沖的占空比改變電機的轉速。經以上兩項測試,電機驅動模塊正常工作。
2)機械臂驅動模塊
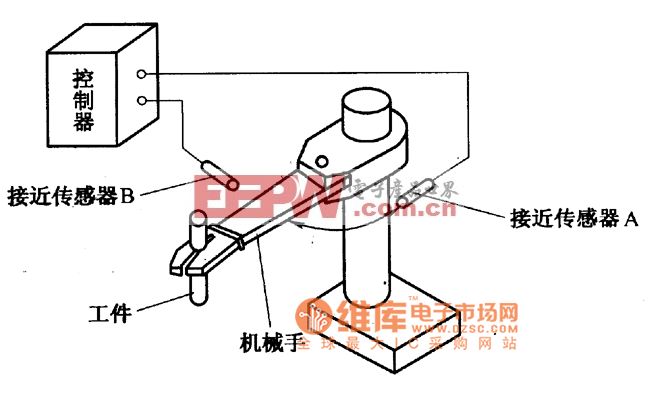
首先測試機械臂是否有效,給控制器一個信號,觀察機械臂能否運作,能否抬起,旋轉,機械手能否抓起東西,如果都能達到,說明機械臂有效。
5 結論
測試表明,機器人能夠較好的完成實驗的基本要求和發揮部分,通過各種方案的討論及嘗試,再經歷過多次的整體軟硬件結合調試,不斷地對系統進行優化,危險物品搬運機器人能夠完成各項功能。在控制策略上,采用人手控制。機器人在進行中不斷改變方向,使其能夠安全的尋跡行駛,選用的電機有PWM占空比的變化改變機器人運行速度,避免沖出范圍。通過無線網絡將車載遠端控制系統和監控平臺結合起來,硬件系統設計合理、小巧、靈活、結構緊湊,實時性好;軟件系統模塊化設計,測試表明該機器人系統工作可靠,能夠滿足處理危險物品任務的要求。



評論