基于ARM的危險品搬運機器人的設計與實現

隨著科學技術的發展,自動化,智能化的程度進一步得到了提高,新一代搬運車的研發在國內外受到越來越多的重視。由于有一些物品具有很高的危險性,不能用人工直接進行搬運,我們設計實現了危險物品搬運機器人系統。可以運用手動控制機器人的搬運,避免了人與危險物品的直接接觸,適用于搬運有毒、易爆的物品,在實際應用中很有意義。如果能夠用智能化機器人系統來替代人來到危險區的話,那樣將會大大減少許多事故的發生。
本文引用地址:http://www.104case.com/article/201609/304032.htm1 搬運機器人系統的功能需求
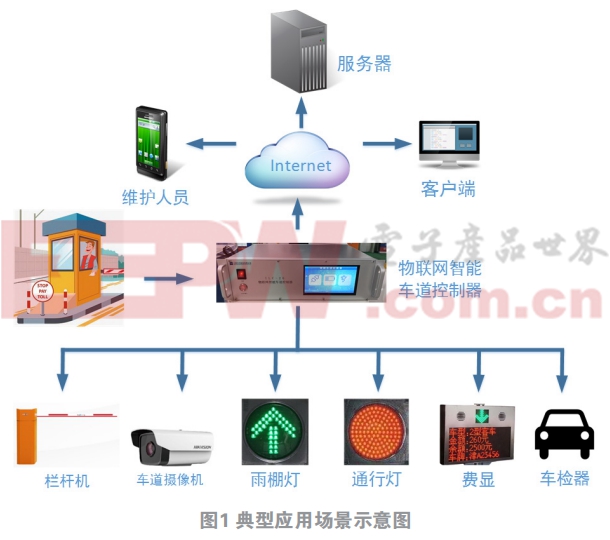
該系統分為兩部分:車載遠端控制系統和監控平臺。車載遠端控制系統根據監控平臺發出的控制指令執行動作,并將采集到的實時視頻圖像發回監控平臺;監控平臺則不斷接收車載遠端控制系統發回的圖像和信息,根據情況遙控操作機器人,實現主從式遙控操作。該系統的設計具有以下的功能:
1)具有輪式行走機構,控制性能好,靈活機動,速度快,平穩,可靠性高;
2)具有視頻監控的功能,能過看到周圍的環境;
3)具有靈恬的機械手,平穩而快速地夾持危險品并搬運至指定位置。
根據危險物品搬運機器人功能需求的特點可以歸納出該系統的性能需求主要包括:
1)機器人直線行走和轉彎行走;
2)USB攝像頭采集圖像;
3)機械臂帶云臺,轉動范圍180度;
4)AS-6DOFB型六自由度機械臂,用來抓取物品。
該系統以ARM處理器S3C6410為核心,選用6410開發板作為主板。各個模塊都是由開發板控制。機器人主要由硬件系統和軟件系統構成。硬件系統主要包括:ARM處理器、外圍接口電路、六自由度機械臂、攝像頭、小車車體以及電源等,其中ARM處理器核心;軟件包括:嵌入式LINUX操作系統、外設驅動程序、LINUX應用程序等。該系統的工作流程為:機器人通過人的控制前后移動,當攝像頭看到前方有危險物品時,機器人通過控制機械手對危險物品進行搬運。
根據實際情況,本系統實現了以下模塊,如圖1所示。
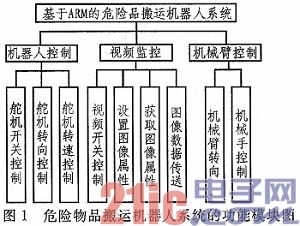
1)機器人控制:主要由電機的開關控制,電機轉向控制,電機轉速控制組合起來的。
2)視頻監控:主要由視頻開關控制,設置視頻圖像屬性,獲取視頻圖像屬性,視頻圖像數據傳送組成的。
3)機械臂控制:由機械臂轉向,機械手張開閉合控制所控制的。
2 搬運機器人系統的硬件設計
2.1 系統的總體硬件設計
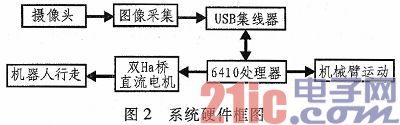
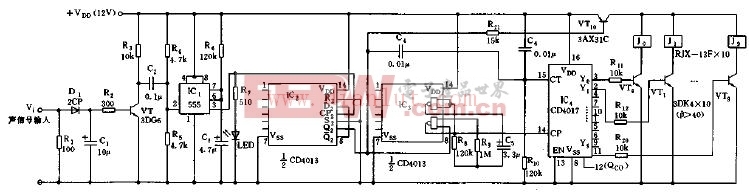
S3C6410是一個16/32位RISC微處理器,旨在提供一個具有成本效益、功耗低,性能高的應用處理器解決方案,采用了64/32位內部總線架構。危險物品搬運機器人的系統硬件框圖如圖2所示,攝像頭負責進行圖像采集,經過USB集線器傳到6410處理器,中央控制器6410控制機械臂的運動,直流電機正反轉向,從而控制機器人行走。
2. 2 直流電機驅動模塊
驅動板主要采用了雙Ha橋直流電機驅動芯片,我們采用ST公司的L298N典型雙H橋直流電機驅動芯片,用于驅動直流電機或雙極性步進電機驅動電路芯片外圍電路主要用由二極管構成的電橋電路,兩組電機并聯而成。
機器人通過采用L298N芯片驅動進行移動,紅綠端子分別為左右兩邊直流減速電機接線座;EA、I1、I2與EB、I3、I4分別為控制信號輸入接口,其中EA與EB分別是左右兩路電機控制接口使能端,高電平有效,可用于PWM調速。表1為接口使用真值表,輸入信號不同,對應電機運轉狀態不同。
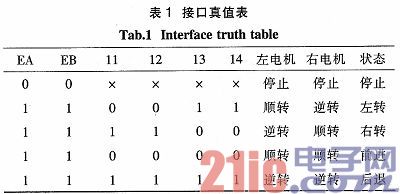
這里EA、I1、I2控制左電機,EB、I3、I4控制右電機,EA、EB為PWM調速接口,加給高電平為全速。此處接口為單路四線兩相步進電機接口,同時也可以驅動2路直流減速電機。
2.3 機械臂
為保證機器人工作的靈活性,機械手設計為由腰身、大臂、小臂、手爪組成,共具有3個關節(腰身-大臂、大臂-小臂、小臂-手爪)7個自由度(腰身1dof,大臂1dof,小臂1dof,手腕4dof)。其中:腰身——1自由度,做旋轉運動。固定安裝在機器人車底盤上,以車體正前方為基準,可分別向左右旋轉135°,兩端各有限位裝置以避免自體碰撞。由液壓控制運動,在底部裝有電位計反饋準確位置以保證控制精度;大臂和小臂——各1自由度,分別相對于上級關節做上下運動,以車體水平面為基準,大臂可向上運動45°、向下運動30°,小臂可向上運動25°、向下運動60°。由液壓控制運動,用電位計回饋,保證關節位置準確;手爪——4自由度,分別做上下擺動、旋轉、伸縮、夾持運動,以小臂延長線為基準,手爪可上下擺動±90°,又可以小臂為基準軸旋轉±180°,伸1米,采用伺服電機提供動力,通過減速箱減速保證功率需求,由伺服電機控制器控制。有編碼盤反饋,保證位置準確。腰身,大小臂液壓回路有壓力傳感器保護。油壓有穩定裝置。
2.4 攝像頭模塊
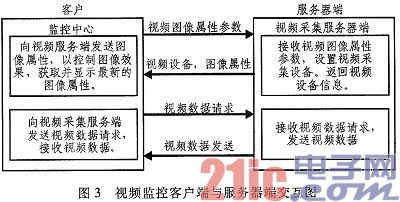
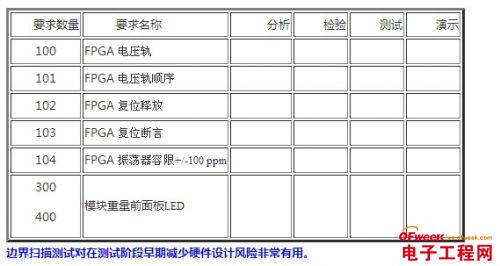
在視頻采集服務器端,接受視頻圖像屬性參數,設置視頻采集設備。返回視頻設備信息嵌入式嵌入式系統建立起來之后,就可以利用嵌入式操作系統內核提供的接口來開發視頻監控軟件模塊了。它整體運行在服務器端,可以在沒有外接網絡的條件下獨立運行。本模塊實現了視頻的采集、播放等功能,客戶端與服務器端的數據交互如圖3所示。
3 搬運機器人系統的軟件設計
3.1 服務器端軟件設計
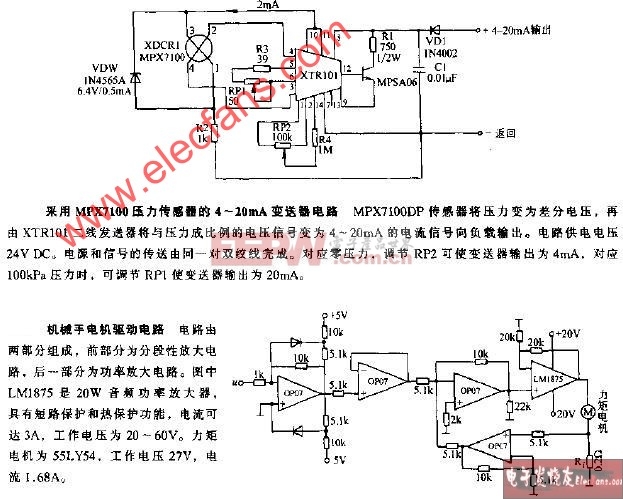
服務器端的軟件運行狀態圖如圖4所示,開始進入服務器端,當無命令進入時,為循環等待狀態,等待接受命令;當接收到命令時,判斷是控制電機還是控制攝像頭命令:當控制電機狀態,判斷為控制機器人還是機械臂;如果是控制機器人,則機器人循環等待控制命令,如果是控制機械臂,則機械臂循環等待控制命令。如果是控制攝像頭命令,則進行圖像、視頻傳輸;當接收到退出進入服務器狀態命令時,退出服務器運行狀態。



評論