基于ARM的分布式干擾機控制單元設計

目前常見的干擾機一般都采用上位機作為控制單元,優點是接口和整個單元開發均較為方便,但缺點是無法脫離計算機獨立工作。本文采用ARM及大尺寸觸摸屏作為平臺開發的分布式干擾機控制單元,ARM與干擾機可集成為一體,具有攜帶方便、穩定性高、成本低、功耗小、可移植性好等優點。
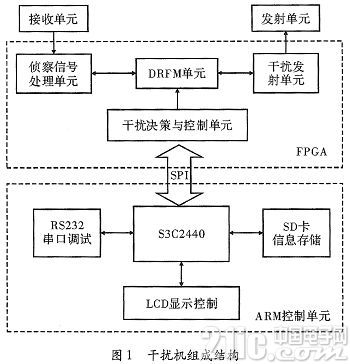
本文引用地址:http://www.104case.com/article/201609/303796.htm設計的分布式干擾機由兩套干擾機構成,實現對雷達的分布式協同相干和非相干干擾。兩套干擾機在軟硬件上均采用相同的設計,其組成結構如圖1所示。
1 系統硬件設計
1.1 硬件平臺的選擇
如圖1中,ARM控制單元所用平臺為友善之臂公司推出的Miero2440開發板,特點如下:
(1)采用Samsung S3C2440為微處理器,主頻400 MHz,并采用專業穩定的CPU內核電源芯片和復位芯片來保證系統運行時的穩定性。
(2)支持Thumb/ARM雙指令集,能很好地兼容8位/16位器件,大量使用寄存器,尋址方式靈活簡單、指令執行速度更快、效率更高。
(3)是第一款統一采用支持EABI標準交叉編譯器的開發板(EABI是ARM結構下的一個編譯規范和標準,而只有符合EABI標準的編譯工具編譯出來的目標文件才是互相融合的,這對于后期開發程序進行交叉編譯以及移植尤為重要),而其他同類開發板仍在使用拼湊的各個版本的編譯器,會導致開發效率不高,可移植性不好。
(4)擁有4個通過USB HUB芯片擴展的USBHost以及1個USB Slave。其中4個USB Host接口和普通PC的USB接口相同,可以接常見的USB外設,這對于開發過程中需要暫時外接鍵盤鼠標進行系統測試提供了便利;而USB Slave的主要作用是下載Linux內核至開發板中,以及系統一但崩潰可通過其進行快速恢復。
綜上所述,Micro2440是一款實用的ARM9開發板,系統穩定性好、主頻高、運行速度快,可減少軟件開發時間,外圍設備資源豐富,從而降低系統的復雜度、減少系統成本。所以最終選擇Micro2440作為系統的硬件平臺。
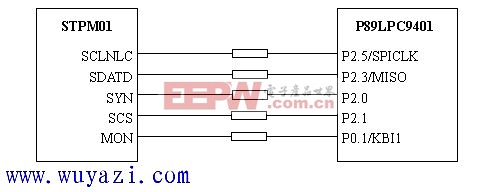
1.2 SPI驅動的開發
設備驅動是操作系統的一部分,一般情況下操作系統并未給各種類型的硬件提供設備驅動程序,而操作系統在無設備驅動的支持下無法正常控制硬件。所以要結合系統具體的硬件情況開發設備驅動。
Micro2440的SPI接口可以進行串行數據傳輸,它包含SPIO和SPI1兩個SPI接口,每個接口分別有兩個8位數據移位器用于數據的接收和發送,數據同時進行發送和接收。SPI驅動的添加通過編譯內核實現,它與內核一同啟動。SPI驅動在被加載時,先調用init_module(),該入口點函數用來初始化設備驅動程序,其一個重要功能是往內核中注冊此設備,完成注冊則需要調用register_chrdev()。
該設備成功注冊后,會得到自定義的次設備號以及系統為之分配好的主設備號,其中,主設備號用來反映設備類型,次設備號則用于區分同類型的設備,同時和文件系統建立聯系。嵌入式設備驅動程序在卸載時,要回收系統相應資源,這里調用unregister_chrdev()來復位設備的相應寄存器,同時從內核中注銷此設備。而系統調用就是對相應設備進行操作,如調用open、read、write以及ioctl等,以供用戶應用程序使用。圖2描述了嵌入式設備SPI驅動程序在內核中的注冊、卸載與系統調用的全過程。

一般SPI驅動可分為:設備的注冊與注銷、打開與釋放、讀寫、控制以及中斷和輪詢處理等一系列操作。基本的SPI驅動主要操作是一個內核數據結構file_operations,通過該結構為文件系統提供入口點函數,即訪問設備驅動程序的函數,該結構在
1.3 RS232接口設計
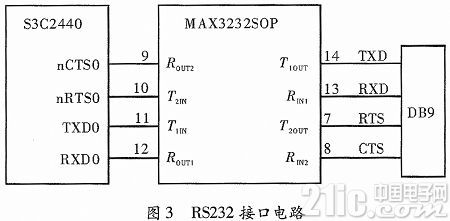
S3C2440集成了3個串口UART0、1、2,文中用到的是UART0。UART0作為標準串口通信,與主機相連用于系統調試、超級終端控制和文件收發。圖3為S3C2440與RS232信號連接圖,其中MAX3232SOP作為串口UART0使用。
1.4 SD卡接口電路設計
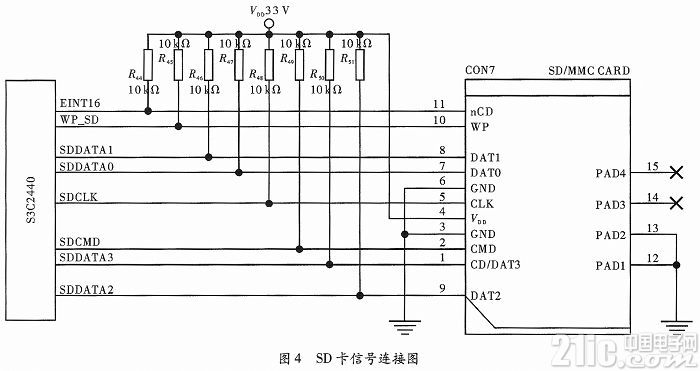
SD卡有兩種總線模式,即SD模式和SPI模式。SD模式采用4根數據線傳輸數據,數據傳輸快,但協議相對復雜。SPI模式采用1根數據線傳輸數據,傳輸速度相對較慢,但傳輸協議與操作簡單。系統采用SD模式進行數據傳輸。SD模式下,SD卡的9個引腳分別是命令、時鐘、3個電源以及4個數據輸入輸出引腳。SD卡通過卡座與主控制器相連,由于S3C24 40提供了專用的多媒體卡接口,簡化了SD卡與S3C2440的硬件連接。具體的信號連接圖如圖4所示。
2 Qt界面設計
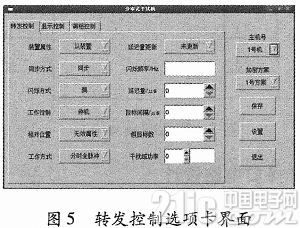
在Qt3.3.8版本下,根據分布式干擾機的功能需求,以及ARM開發板觸摸屏的尺寸綜合進行設計。考慮到顯示屏大小的限制,以及各功能模塊的區分,設計了轉發控制、顯示控制和調相控制3個選項卡,每個選項卡中的編輯項與顯示項相互獨立。其中轉發控制選項卡中主要是ARM控制系統對分布式干擾機的配置參數,如圖5所示。顯示控制則主要用于顯示干擾機測量或計算出的內容,調相控制是對多個假目標角度的配置,這里只截取了轉發控制選項卡的界面截圖。而對于加密方案配置項,一直需要顯示的主機號項,以及隨時可能操作的設置及退出按鈕,獨立于3個選項卡之外,會始終顯示在界面上。








評論