消費級無人機的昨天、今天和明天(一)

目前APM飛控已經成為開源飛控成熟的標桿,可支持多旋翼、固定翼、直升機和無人駕駛車等無人設備。針對多旋翼,APM飛控支持各種四、六、八軸產品,并且連接外置GPS傳感器以后能夠增穩,并完成自主起降、自主航線飛行、回家、定高、定點等豐富的飛行模式。APM能夠連接外置的超聲波傳感器和光流傳感器,在室內實現定高和定點飛行。
本文引用地址:http://www.104case.com/article/201608/295837.htm(二)開源飛控拉低技術門檻,縮短開發周期
開源飛控系統在廣大飛控愛好者、機構的開發維護下,功能日漸強大,系統趨于完善。而且,開源系統的開發維護都是基于GoogleCode、GitHub等開放式開發平臺,開發者們為了保證遠程協作的順利進行,通常會維護一個詳盡具體的說明文檔,這也是開源飛控系統一個突出的特點,即整套飛控系統的開發說明文檔十分詳細,入門教程豐富,非常適合新手學習、了解,或者基于現有飛控系統做二次開發。
PX4、APM等開源飛控憑借完善強大的功能以及相關技術支持,為無人機產品線的開發鋪平了道路。大量實踐表明:一名電子或者自動化相關專業的碩士研究生甚至本科生發燒友,或者相關專業從業人員,都可以按照相關手冊、教程在較短的時間內開發出一臺功能齊備的無人機樣機,這也是隨后出現的井噴現象的一個技術基礎。

3 外部因素:產業配套完善帶來的成本邊際遞減
當開源飛控的成功使得消費級無人機展現在人們眼前以后,是什么原因導致消費級無人機的爆發?我們認為,可以從以下幾個方面歸結原因。1、消費級無人機,主要指四旋翼飛行器,其自身的特點使得基于無人機的互動應用體驗開發門檻降低;2、產業鏈的完善和硬件成本的下降;3、消費者的消費觀念、消費能力達到一定水平,對于這個價位的新興產品具有較強的購買意向和足夠的購買能力;4、外部市場、消費輿論等起到推動作用,最終促成了市場的爆發。
(一)對用戶體驗的要求選擇了四旋翼
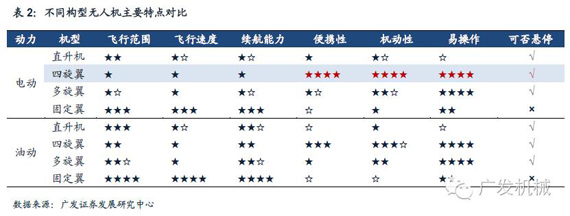
總結一下消費級無人機上的主流應用,基本都是建立在四旋翼飛行器穩定持續的懸停的飛行特點上,以航拍為例,傳統的固定翼、直升機航拍也曾興起,但是固定翼航拍很難實現近距離重點部位聚焦;直升機雖然實現了懸停,但是飛控系統復雜,控制效果差。當四旋翼無人機以一個靈活、精準、穩定的任務載荷平臺出現在了市場后,航拍市場迅速爆發。






評論