2016 深度學(xué)習(xí)機器人領(lǐng)域最新應(yīng)用及趨勢總結(jié)

編者按:深度學(xué)習(xí)在機器人領(lǐng)域還僅僅處于起步階段,而將來深度學(xué)習(xí)在機器人領(lǐng)域中的應(yīng)用對發(fā)展通用人工智能大有助益。
訓(xùn)練數(shù)據(jù)都從哪里來??
本文引用地址:http://www.104case.com/article/201608/295483.htm很多講者都提到了訓(xùn)練數(shù)據(jù)的問題。Pieter Abbeel強調(diào)了OpenAIGym平臺可以用于解決合成強化學(xué)習(xí)機器人問題。
很多人都采用這樣的方法:先在合成數(shù)據(jù)庫上做試驗,之后再使用現(xiàn)實世界數(shù)據(jù)進(jìn)行更復(fù)雜的模擬。
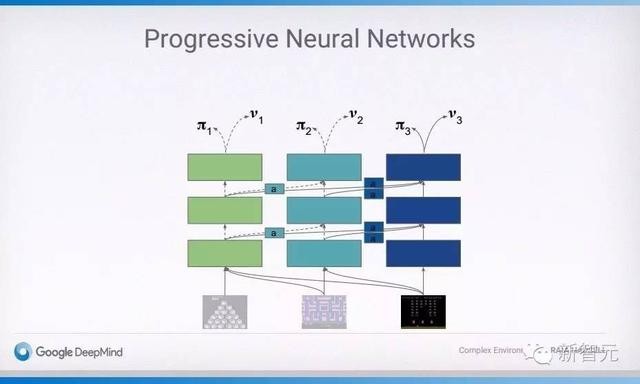
谷歌DeepMind的RaiaHadsell在演講中提到了PNN非常適用于這一過程。最先是訓(xùn)練系統(tǒng)玩ATARI游戲,然后發(fā)展成模擬的三維機械臂控制問題,結(jié)果發(fā)現(xiàn)使用了預(yù)先訓(xùn)練過的PNN框架的系統(tǒng)學(xué)得更快、性能更好。
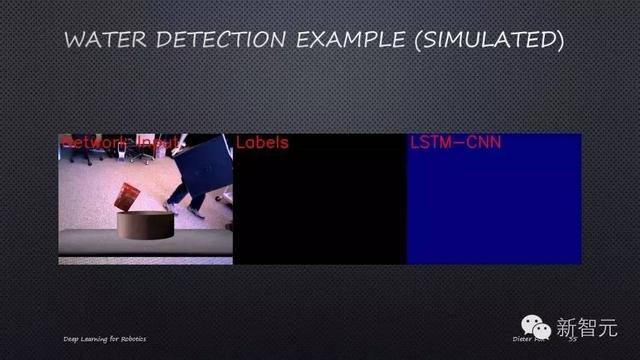
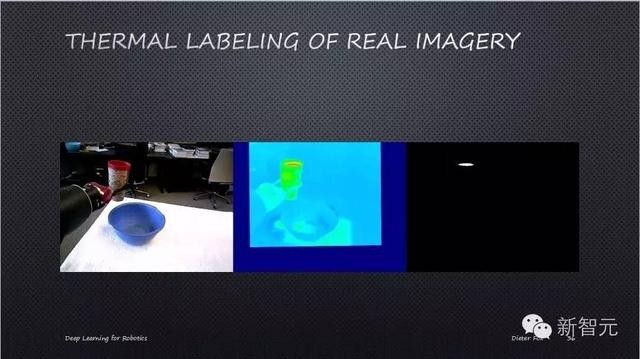
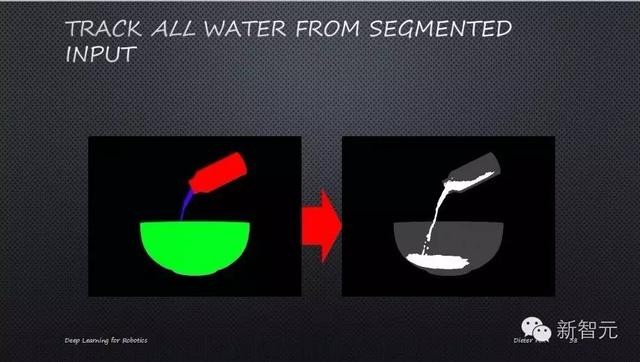
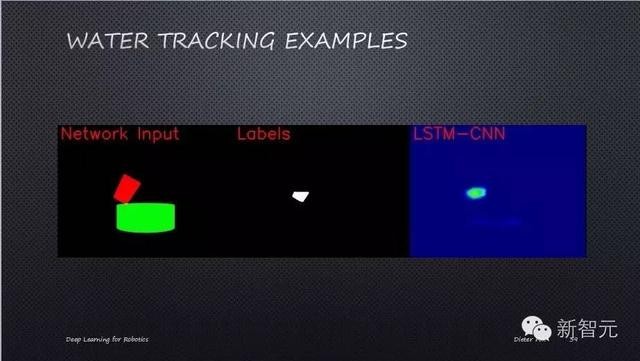
DieterFox的實驗室也采取了類似的方法。他們?yōu)榱黧w模擬時,先使用混合的流體模擬,然后再使用現(xiàn)實世界的數(shù)據(jù)。











評論