利用C2000 MCU實施并網(wǎng)微型太陽能逆變器

2、 入網(wǎng)電流控制器。電流控制器可確保輸出電流為正弦波,并遵循電流基準,從而平衡輸入功率和輸出功率。
本文引用地址:http://www.104case.com/article/200735.htm3、 最大功率點追蹤(MPPT)。MPPT用于讓太陽能板進入最大功率輸出狀態(tài)。
3.2 固件結(jié)構(gòu)
3.2.1 后臺與任務(wù)
整個固件系統(tǒng)為一個前向后臺系統(tǒng)。圖15顯示了該后臺結(jié)構(gòu)。
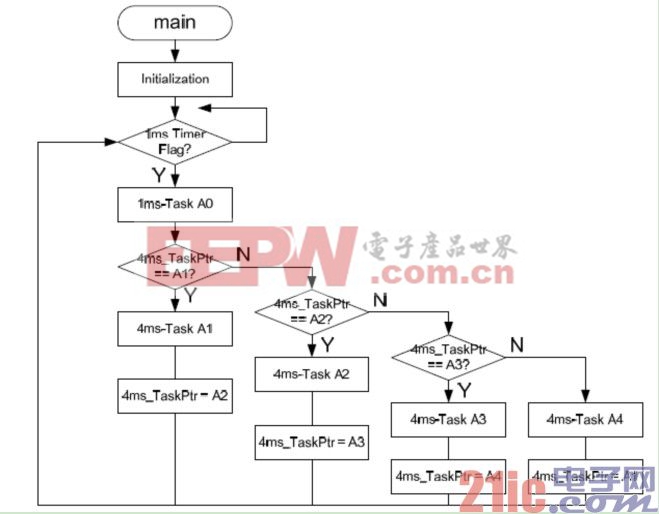
圖15后臺結(jié)構(gòu)
本系統(tǒng)中,有一個1ms任務(wù)和四個4ms任務(wù)。
1、1ms任務(wù)A0。1ms定期任務(wù)。在這種任務(wù)中,LED控制執(zhí)行。除此以外,PLL控制器也位于該任務(wù)中。
2、4ms任務(wù)A1。A1 4ms定期任務(wù)。狀態(tài)機處理器。
3、4ms任務(wù)A2。A2 4ms定期任務(wù)。所有測量均在該任務(wù)中計算。
4、4ms任務(wù)A3。A3 4ms定期任務(wù)。用戶鍵檢測便在這里,同時檢測超出或者未達到運行狀態(tài)范圍,并發(fā)出故障指令。
5、4ms任務(wù)A4。A4 4ms定期任務(wù)。MPPT控制器與調(diào)試支持。
3.2.2 系統(tǒng)狀態(tài)機
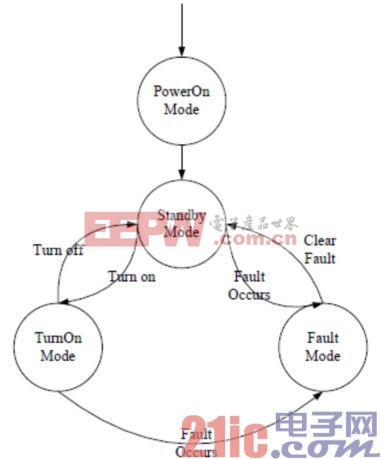
圖16狀態(tài)機
圖16顯示了任務(wù)A1中處理的狀態(tài)機。不同狀態(tài)代表不同的運行模式。
本系統(tǒng)中共有4種狀態(tài)模式:
l 上電
l 待機
l 開啟
l 故障
上電模式是系統(tǒng)上電的一種過渡模式。在這種模式下,系統(tǒng)進行一些初始化,之后,系統(tǒng)便自動進入待機模式。
待機模式是系統(tǒng)等待開啟指令的一種模式。所有PWM和SCR控制信號都關(guān)閉。在這種模式下,所有測量均有效。系統(tǒng)探測外部狀態(tài),并檢查系統(tǒng)是否可以開啟。
當(dāng)系統(tǒng)成功地從待機模式啟動以后,系統(tǒng)進入開啟模式。這種模式下,所有PWM和SCR控制信號均開啟。系統(tǒng)開始向電網(wǎng)輸電。
如果出現(xiàn)故障,系統(tǒng)進入故障模式,所有PWM和SCR控制信號均關(guān)閉。如果故障清除,則系統(tǒng)自動返回待機模式。
3.2.3 中斷服務(wù)程序
本系統(tǒng)的中斷服務(wù)程序(ISR)具有如下功能:
l 讀取ADC結(jié)果和部分測量計算。
l 入網(wǎng)電流控制器
l SCR開/關(guān)控制
l 緊急保護。一次側(cè)沖擊電流、二次側(cè)過電壓和輸出電流保護。
l 調(diào)試支持。把調(diào)試數(shù)據(jù)記錄到緩沖器。
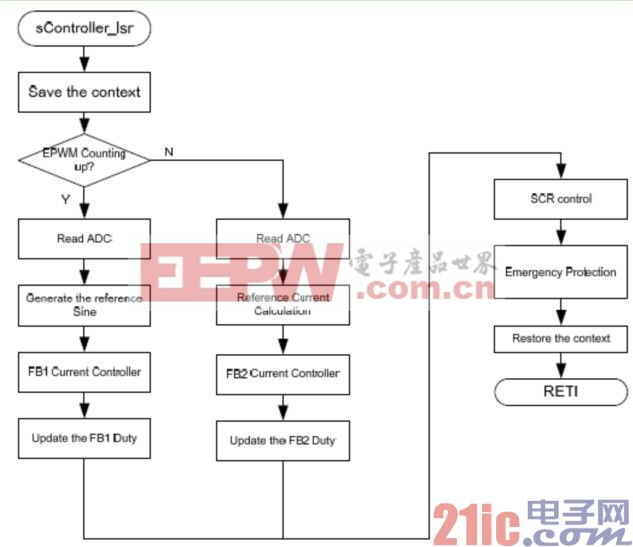
圖17 ISR流程圖
3.3 入網(wǎng)轉(zhuǎn)換器控制器
圖18顯示了整個入網(wǎng)轉(zhuǎn)換器結(jié)構(gòu)。
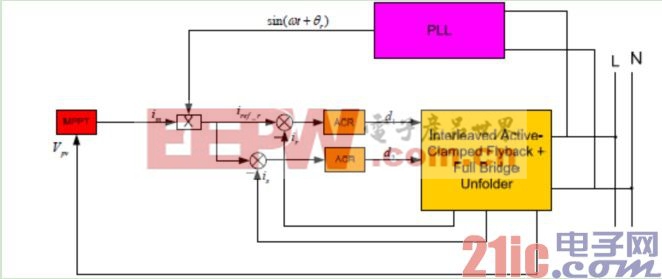
圖18控制器結(jié)構(gòu)
3.3.1 PLL控制器
圖19顯示了PLL控制器系統(tǒng)
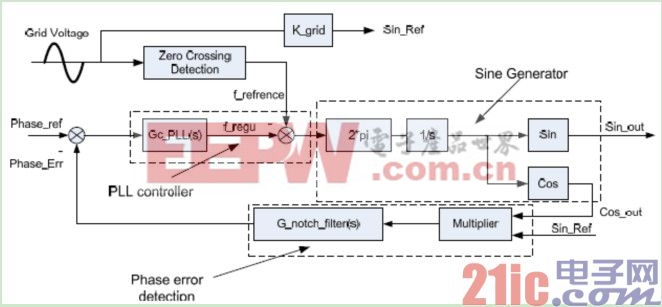
圖19 PLL控制系統(tǒng)圖
PLL系統(tǒng)由如下幾部分組成:
相位誤差檢測。檢測基準和正弦波輸出之間的相位誤差。該檢測功能在1ms
任務(wù)A0中實現(xiàn)。
PLL控制器。閉環(huán)控制器,控制器在1ms任務(wù)A0中執(zhí)行。
正弦波生成器。根據(jù)頻率和采樣時間生成正弦波;在ISR中完成這項工作。
3.3.2 電流控制器
為了設(shè)計電流環(huán)路,必須首先建造對象模型。這里可以使用小信號模型。
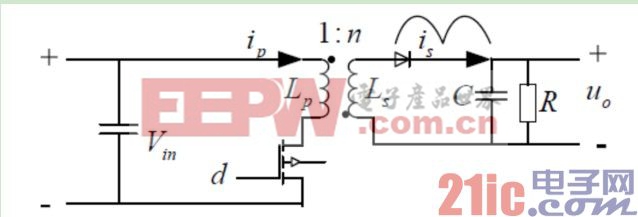
圖20反激電路
假設(shè)反激電路如圖6所示;另外,假設(shè)其在連續(xù)模式下工作。
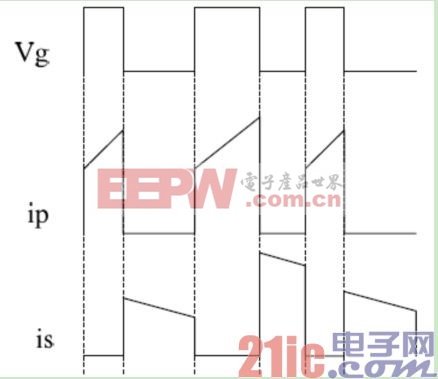
圖21反激連續(xù)模式電流
如果一次側(cè)的MOS開啟,則一次側(cè)電流增加,Lp充電,并且能量被存儲在其內(nèi)部。因此,可得到如下方程式:

如果Q1關(guān)閉,則能量被立即傳輸至二次側(cè),ip很快降至零。在二次側(cè),二極管開啟,次電感接過負載,并對C充電。可得到方程式(2)。

主電感Lp和次電感Ls具有如下關(guān)系:
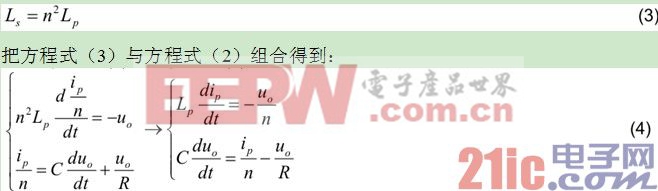
利用這種平均狀態(tài)空間方法,如果占空因數(shù)為d,則可以得到如下方程式:






評論