利用C2000 MCU實施并網微型太陽能逆變器

電容器額定電壓必須超出NVo,并且超出量為Lr的壓降:

鉗位電容器和諧振電感的諧振時間可通過下列方程式計算得到:

2.3.3 有源鉗位反激的開環仿真
圖11為這種有源鉗位反激的開環仿真模型。下列值用于該仿真:輸入電壓Vin=36V,主MOSFET開關頻率fs=65kHz,諧振電感Lr=0.5µH,諧振電容Cr=1nF,鉗位電容Cc=10µF,主開關MOSFET的最大占空因數D=0.6,而負載Rload=100 Ω。
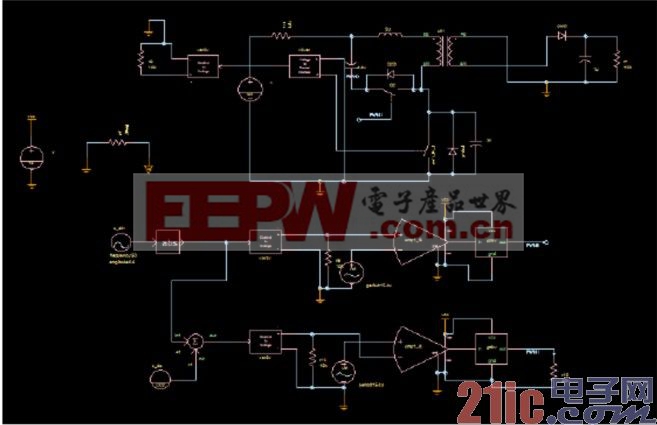
圖 11 有源鉗位反激的開環仿真模型
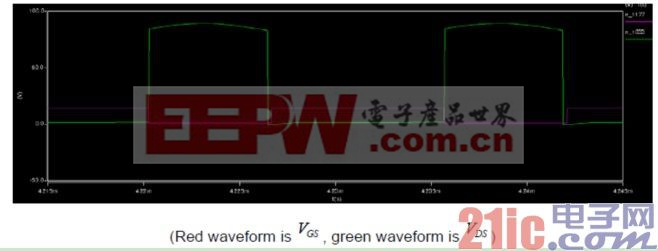
(紅色波形為VGS,綠色波形為VDS)
圖 12 Q1的VDS和VGS仿真波形
圖12顯示了漏極到源極電壓降至零以后門驅動的電壓上升,因此Q1實現ZVS得到了證實。另外,VDS的電壓尖峰被箝至Vin+NVout,其意味著一次側實現了有源鉗位。

2.4 隔離式MOSFET橋驅動電路設計
為了實現一次側到二次側的完全隔離,除輔助電源隔離以外,還要求使用A/D采樣和驅動電路隔離。
由于MCU放置于二次側中,而主開關MOSFET位于一次側,因此我們必須把二次側控制信號傳輸至一次側,以對MOSFET進行控制。
為了把控制信號從二次側傳輸至一次側,可選擇高速數字隔離器加高低端驅動器芯片。圖14顯示了這種隔離式MOSFET高低端驅動器的原理圖。
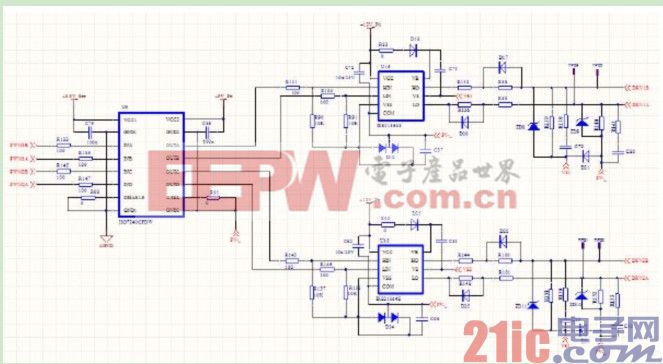
圖 14 隔離式高低端驅動器的原理圖
在本應用中,隔離式MOSFET擁有許多特點,其包括:
l 結構簡單,易于實現
l +600V全工作范圍
l 4kV ESD保護
l 自舉工作
另外,請注意高速數字隔離器的初始狀態;否則,它會損壞主開關MOSFET。

表 1 高速數字隔離器功能表
(PU=上電;PD=掉電;X=無關;H=高電平;L=低電平)
3、固件設計
3.1 固件規范
3.1.1 功能規范
系統固件包括如下功能:
1、 開/關。用戶可通過按下開/關按鈕開啟或者關閉系統。軟件設置必須啟用這種功能。
2、 自動開/關。如果需要開啟狀態,則系統會自動開啟。當狀態不適合向電網輸電時,系統保持待機模式,并監控狀態變化。如果系統已經開啟,則當狀態不適合供電時系統自動關閉。
3、 軟件啟動開啟。當系統必須開啟時,其從零電流供給狀態啟動,同時PWM在零交叉點開啟,從而減少給電網帶來的沖擊電流。
4、 LED控制。系統擁有一個狀態LED指示。當系統處在待機模式下時,相應LED每1.2秒閃爍一次。當系統開啟時,LED每隔2.4秒閃爍一次。當出現故障時,LED持續亮起。
5、 用戶控制鍵。逆變器具有一個用戶鍵。該用戶鍵可開啟或者關閉逆變器,并且還可以清除故障。當系統處在待機模式下時,如果該鍵被按下1秒以上,則如果條件符合系統便開啟。如果系統已經開啟,則當該鍵被按下1秒以上時,系統關閉。當出現故障且系統處在故障模式下時,按下該用戶鍵1秒以上,可清除故障并再次進入待機模式。
3.1.2 測量
為了控制和監測系統狀態,需計算下列測量結果:
l 電網電壓RMS
l 電網頻率
l 逆變器的輸出有效功率
l 輸入功率
l 輸入PV電壓
l 溫度
3.1.3 保護
系統具有一些基本保護功能。
1、 一次側沖擊電流保護。當短路或者主電感引起沖擊電流時,PWM首選會進入CBC模式;但是,當CBC三次以上時,系統關閉并進入故障模式。
2、 二次側過電壓保護。當SCR未正常開啟時,出現二次側超高壓。系統關閉,并進入故障模式。
3、 輸出過電流保護。當輸出電流量超出閾值時,出現輸出過電流。系統關閉,并進入故障模式。
4、 電網電壓/頻率過高/過低保護。如果系統已經開啟,當電網電壓/頻率超出正常范圍時,系統在五個電網周期內關閉。
5、 反孤島抑制保護。如果達到孤島條件,則系統在4秒內關閉。如果恢復至正常狀態,則系統在1秒內重新啟動。
6、 過溫保護
3.1.4 入網轉換器控制器
為了向電網輸電,必須在系統中實現下列控制器算法:
1、 鎖相環(PLL)控制器。PLL控制器用于與電網電壓同步,其可向電流控制器提供一個基準相。






評論