組合導航定位技術在機車安全監控系統中的應用研究

(4)軌道判斷
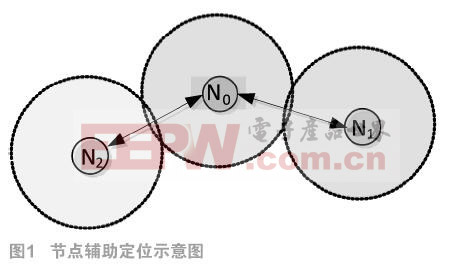
在機車進站時,GPS信號可能會收到遮蔽影響,即使GPS正常工作,但由于軌道間距比較小,要判斷機車所在軌道還是有難度,因此,需要通過陀螺儀來獲取軌道弧度數據。根據弧度和角速度之間的關系:
![]()
在t1到 t2時間段內,總的弧度計算公式為:
![]()
設陀螺儀的采樣間隔為T,則使用分段線性化來計算該積分:

其中n為t2時刻的角速度,m為t1時刻的角速度。(m-n)T為求和時間長度,該求和時間長度依據軌道參數進行智能調整。在該終端的Flash中,已經保存了軌道線路參數(包括道岔處的弧度信息),將計算所得的θ1和道岔處的弧度信息做比較,就可以判斷出機車進入的具體軌道。
3 測試數據及結果分析
ADXRS150微硅陀螺儀輸出角速度信號經過A/D轉換后,再轉換為弧度。其前面的正號代表順時針轉動,負號表示逆時針旋轉。結合目前所在位置的軌道參數,對機車所在軌道進行判斷,并與GPS方位角進行了對照分析。
測試位置為:北緯22度57分4728秒,東經108度21分0413秒,當前機車速度為49.5km/h,對機車穿越道岔時段時數據進行了分析,如圖2、圖3所示。
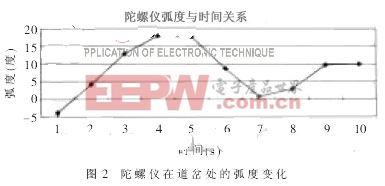

該測試數據說明,機車在該位置順時針方向轉動行駛,通過查詢本地Flash中的數據,準確判斷了機車在道岔處所選擇的軌道。
基于GPS、陀螺儀、機車速度傳感器的組合定位技術,解決了單一GPS定位的缺陷,提高了定位精度,結合中心電子地圖,準確判斷了機車進站軌道。在測試和試運行中,取得了明顯的效果,為機車的實時監控和安全預警提供了可靠的軌道位置數據。





評論