基于GPS/航跡推算組合導(dǎo)航的列車(chē)防撞系統(tǒng)設(shè)計(jì)

摘要:針對(duì)同一軌道上列車(chē)防撞預(yù)警,采用GPS衛(wèi)星定位和航跡推算實(shí)現(xiàn)組合定位,通過(guò)無(wú)線數(shù)傳技術(shù),可用于復(fù)雜軌道地理環(huán)境(隧道、森林、丘陵等)下的局域鐵路網(wǎng)行車(chē)安全管理。實(shí)驗(yàn)測(cè)試表明系統(tǒng)能夠滿足應(yīng)用要求。
本文引用地址:http://www.104case.com/article/201808/387037.htm0 引言
碰撞避免問(wèn)題是現(xiàn)代交通運(yùn)輸領(lǐng)域的重要研究問(wèn)題,與人們的生活息息相關(guān),在航空、航海、道路以及軌道交通領(lǐng)域均有很多的研究。如航空領(lǐng)域中的交通預(yù)警和避撞系統(tǒng)/自決策監(jiān)督廣播系統(tǒng)TCAS/ADS—B;航海領(lǐng)域中的船舶自動(dòng)識(shí)別系統(tǒng)AIS;道路交通領(lǐng)域的車(chē)-車(chē)避撞系統(tǒng)C2C等。
道路交通、航空以及航海等領(lǐng)域都已經(jīng)有了較為成熟的防撞預(yù)警系統(tǒng),相比之下,軌道交通領(lǐng)域的防撞預(yù)警系統(tǒng)研究起步較晚,開(kāi)發(fā)實(shí)際難度也較大。本文主要針對(duì)低速運(yùn)行的貨運(yùn)列車(chē)在復(fù)雜的軌道地理?xiàng)l件(隧道、森林、丘陵等)下運(yùn)行,合理使用單片機(jī)技術(shù)、GPS衛(wèi)星定位技術(shù)和航跡推算導(dǎo)航算法,設(shè)計(jì)出低成本的鐵路列車(chē)防撞系統(tǒng)。
1 系統(tǒng)總體介紹
列車(chē)防撞預(yù)警系統(tǒng)由定位系統(tǒng)、無(wú)線通信機(jī)制、決策系統(tǒng)以及報(bào)警裝置等部分組成。其系統(tǒng)結(jié)構(gòu)圖如圖1所示。
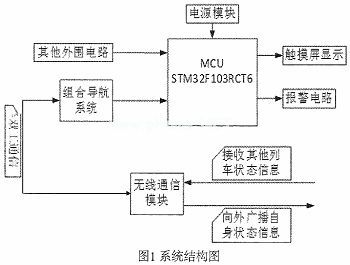
系統(tǒng)啟動(dòng)后,首先將自身信息(實(shí)時(shí)位置、實(shí)時(shí)速度等)廣播到附近區(qū)域,同時(shí)接收所在區(qū)域中的其他裝有該系統(tǒng)的廣播信息。列車(chē)通過(guò)這些從其他列車(chē)接收到的信息,可以全面了解目前附近的交通狀況,若存在發(fā)生危險(xiǎn)的可能則立即向列車(chē)員提供警告和建議,從而避免碰撞事故的發(fā)生。因此,該防撞預(yù)警系統(tǒng)主要有三個(gè)功能:①位置、速度等相關(guān)信息的獲取;②廣播并接收這些相關(guān)信息;③對(duì)這些信息進(jìn)行處理并檢測(cè)是否存在碰撞危險(xiǎn),若存在則發(fā)出報(bào)警信號(hào)。
2 組合導(dǎo)航系統(tǒng)
組合導(dǎo)航系統(tǒng)主要是為列車(chē)防撞預(yù)警系統(tǒng)提供可靠的位置信息、列車(chē)的實(shí)時(shí)定位信息對(duì)列車(chē)控制與系統(tǒng)進(jìn)行碰撞檢測(cè)有至關(guān)重要的作用。
2. 1 GPS全球衛(wèi)星定位系統(tǒng)
GPS(Global Position System,全球衛(wèi)星定位系統(tǒng))定位的基本原理是根據(jù)高速運(yùn)動(dòng)的衛(wèi)星瞬間位置作為已知的起算數(shù)據(jù),采用空間距離交匯原理,確定待測(cè)點(diǎn)的位置。鐵路上已開(kāi)發(fā)成熟的自動(dòng)閉塞系統(tǒng)證實(shí)了GPS適用于列車(chē)定位,GPS定位不依賴于其他軌旁設(shè)備,只需一部高精度GPS終端接收機(jī)便能實(shí)現(xiàn)常規(guī)定位。但是GPS存在動(dòng)態(tài)響應(yīng)能力差、易受電子干擾、信號(hào)容易被遮擋等缺點(diǎn)。如果GPS信號(hào)長(zhǎng)時(shí)間不能得到及時(shí)恢復(fù),系統(tǒng)的誤差就不可避免隨時(shí)問(wèn)而積累。當(dāng)列車(chē)行駛在GPS信號(hào)不好的隧道、森林中時(shí),純粹的衛(wèi)星定位將不能滿足系統(tǒng)要求。
2.2 DR航跡推算定位系統(tǒng)
DR(Dead Reckoning,航跡推算系統(tǒng))是利用已知的載體初始位置,根據(jù)運(yùn)動(dòng)載體在該點(diǎn)的航向、航速和航行時(shí)間,實(shí)時(shí)推算下一時(shí)刻的坐標(biāo)位置的一種導(dǎo)航定位方法。它是一種自主式定位,其定位精度不會(huì)受到如電磁干擾、遮擋等外界因素的影響。但是,航跡推算系統(tǒng)不具有長(zhǎng)期的穩(wěn)定性,必須每隔一段時(shí)間進(jìn)行誤差校正。本系統(tǒng)所使用的航跡推算系統(tǒng)類似于車(chē)載里程儀,其構(gòu)造和原理也大致相同,都是由一個(gè)磁電傳感器和一組貼在車(chē)輪上的磁片構(gòu)成,車(chē)輪每旋轉(zhuǎn)一圈,磁電傳感器便產(chǎn)生一定數(shù)量的脈沖,通過(guò)對(duì)這些脈沖的計(jì)數(shù),便知列車(chē)在這段時(shí)間的行程,在時(shí)刻的列車(chē)運(yùn)行行程為

式中,n(t)為t時(shí)刻輸出的脈沖數(shù):n(t)-n(t-1)即為本周期內(nèi)的輸出脈沖數(shù);M為車(chē)輪每轉(zhuǎn)一圈應(yīng)該輸出的脈沖數(shù);D為車(chē)輪直徑。
根據(jù)在t時(shí)刻的列車(chē)運(yùn)行行程,可得列車(chē)的運(yùn)行速度為
式中,τ為計(jì)數(shù)周期,當(dāng)計(jì)數(shù)周期較小時(shí),該速度可近似描述列車(chē)的瞬時(shí)速度。
2. 3 組合導(dǎo)航算法
當(dāng)列車(chē)運(yùn)行在隧道等衛(wèi)星信號(hào)不好的情況下時(shí),系統(tǒng)會(huì)自動(dòng)記錄下最后一個(gè)GPS輸出的有效坐標(biāo),同時(shí),DR系統(tǒng)以該點(diǎn)為坐標(biāo)原點(diǎn)的地理坐標(biāo)系(一般取東、北、天坐標(biāo)系,滿足右手定則)作為航跡推算的參考坐標(biāo)系,并取該點(diǎn)為其推算位置的起點(diǎn),利用航向傳感器和DR系統(tǒng)可確定每一時(shí)刻車(chē)輛的位置:

式中,x(t),y(t)是t時(shí)刻列車(chē)在參考坐標(biāo)系下的位置;x(t-1),y(t-1)是t-1時(shí)刻列車(chē)在參考坐標(biāo)系下的位置;θ是測(cè)向速度與參考坐標(biāo)系北向的夾角。在此,我們將隧道做一個(gè)合理地簡(jiǎn)化,在一般情況下我們認(rèn)為隧道為直隧道。于是,可根據(jù)系統(tǒng)記錄下的最后一個(gè)GPS輸出的有效坐標(biāo)結(jié)合列車(chē)的實(shí)時(shí)位置進(jìn)行航跡推算:
式中,λ(t)、L(t)分別為航跡推算過(guò)程中列車(chē)的實(shí)時(shí)經(jīng)度和緯度;λ0、L0分別為起點(diǎn)經(jīng)緯度。
3 硬件設(shè)計(jì)
3.1 組合導(dǎo)航模塊
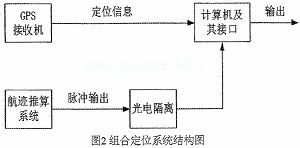
GPS定位具有長(zhǎng)期的穩(wěn)定性,但定位不連續(xù),航跡推算系統(tǒng)恰恰具有良好的短期穩(wěn)定性,但必須每隔一段時(shí)間進(jìn)行定位誤差校正。可見(jiàn)GPS定位和DR具有很強(qiáng)的互補(bǔ)性,本系統(tǒng)就是采用了GPS/DR組合定位系統(tǒng),通過(guò)DR定位誤差補(bǔ)償,確保了列車(chē)在GPS信號(hào)丟失時(shí)仍能有效地確定列車(chē)的實(shí)時(shí)位置。組合定位系統(tǒng)結(jié)構(gòu)圖如圖2所示。






評(píng)論