基于PIC單片機的一種車載紅外夜視儀設計

①初端
該部分核心是PIC16F877A單片機。它是由美國Microchip公司生產的8位單片機,具有獨特的RISC結構,數據總線和指令總線分離的哈佛總線結構。它連接各個終端設備,響應主控機發送來的查詢命令,并將被測設備的狀態信息回送給主控機。單片機的I/O口與被測設備的終端相連,以獲取所需狀態信息。電路分為三部分:數據采集電路(圖3)、LED顯示電路、按鍵電路。
單片機2腳外接溫度傳感器,將系統實時溫度變化信號傳遞給單片機;3~7腳外接LED顯示電路,引腳低電平信號接通時,相應的LED變亮;8、9腳外接激光器驅動電路,對激光器狀態進行檢測;19腳外接半導體制冷器,搜集信息,并決定是否觸發半導體制冷器工作;22、25、26腳接通信電路,向主控芯片傳遞信號;27~40腳為云臺和鏡頭按鍵檢測信號,當操作人員按面板上的按鍵時,單片機通過這些端口接收到按鍵信號,通過通信電路將這些信息發送到主控芯片,主控芯片收到信號后進行分析、控制,執行相應的命令。本文引用地址:http://www.104case.com/article/197789.htm

②通信電路
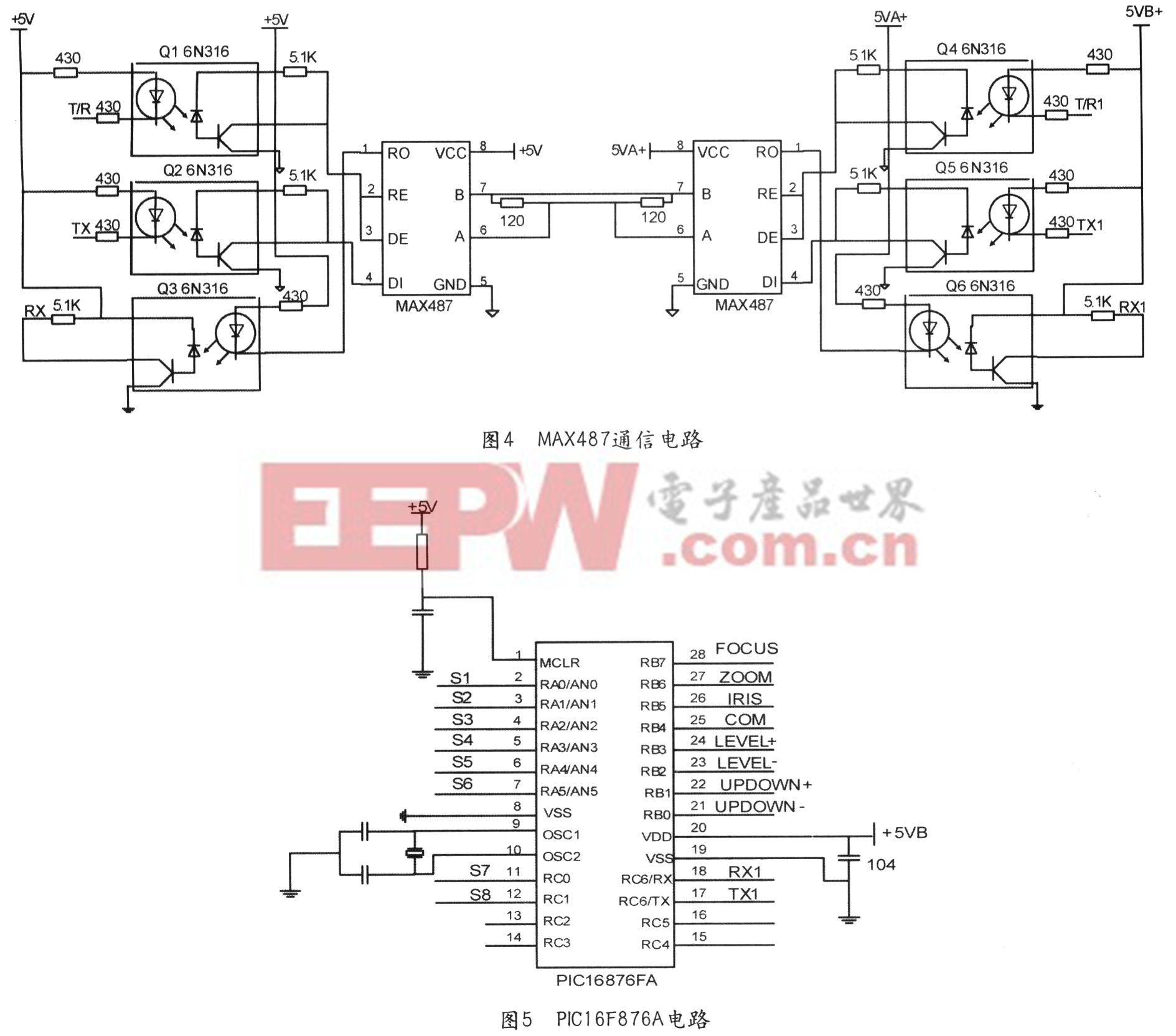
通信電路連接傳動系統的初始端和接收端,主要功能是實現信號的接收與傳遞。采用Max487芯片,它是一款用于通信的低功率半雙工收發器件,內部集成了一個驅動器和接收器。初始端首先對信號進行編碼,接收端對信號進行解碼,同時為了消除干擾,采用光耦對電路進行了隔離。見圖4。
③末端
末端控制芯片采用PIC 16F876A單片機。RA0-RA5、RC0、RC1引腳分別為檢測云臺上到位、下到位、左到位、右到位、上復位、下復位、左復位、右復位的八個信號輸入端口;RB0-RB7為控制鏡頭焦距、放大、云臺上下左右轉動的八個端口,外接繼電器電路控制電機轉動。如圖5所示。
3)軟件設計
整個系統軟件分為主控機PIC 16F876A端和從控機PIC16F877A端。除了通信接口部分的軟件以外,主控機端軟件還包括用戶界面、數據處理等。從控機端軟件包括數據采集和MAX487通信程序。從控機端通信接口軟件流程如圖6所示。












評論