μC/OS-II的CAN驅動程序設計

4 CAN協議層
從OSI網絡模型的角度來看,現場總線網絡一般實現了第1層(物理層)、第2層(數據鏈路層)、第7層(應用層);而CAN現場總線僅僅定義了第1層、第2層,這兩層分別由CAN收發器和CAN控制器實現。CAN總線沒有規定應用層,本身并不完整,因此需要一個高層協議來定義CAN報文中11/29位標識符、8字節的使用。目前,已經有一些國際上標準的CAN總線高層協議,例如DeviceNet協議和CANopen協議;但是這個協議規范比較復雜,理解和開發難度都比較大,對于一些并不復雜的基于CAN總線的控制網絡不太適合。本設計采用國內周立功CAN開發組織根據實際應用制定的簡單的CAN應用層協議I-CAN協議,作為軟件設計的CAN協議層。ICAN協議中的29位幀標識符定義如表1所列。

CAN總線仲裁是從標識符的最高位(28位)開始逐位進行的。每一個發送器都對發送位的電平與被監控的總線電平進行比較:如果相同,則這個單元可以繼續發送;如果發送的是“隱性”(邏輯1)電平,而監控到的卻為“顯性”(邏輯O)電平,那么該單元就失去了仲裁,必須退出發送狀態。根據I-CAN源節點編號部分可以看出,節點的地址編號越小,優先級也就越高,在仲裁時能夠優先獲得總線使用權。在CAN網絡系統中,節點越重要,分配的地址編號的優先級相應地也越高。譬如,車載網絡中的發動機電控單元就應該比定向大燈電控單元的優先級高,這樣才能保證重要的報文及時傳送出去。在節點接收到報文之后,應用程序依據I-CAN協議解析報文標識符,并實現其指定的功能。
5 CAN應用層
CAN應用層實現CAN控制器的所有功能。CAN設備控制驅動層、CAN接口驅動層和CAN協議層都在應用層的控制之中。應用層主要實現的任務包括:
①初始化CAN控制器,以及與應用層相關的全局變量。
②編寫CAN控制器的中斷服務程序。
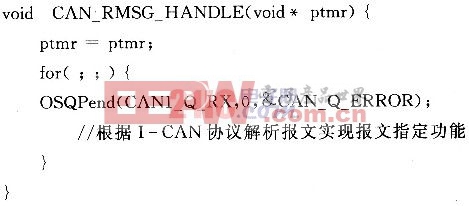
③報文處理任務。該任務基于I-CAN協議來解析報文,并實現報文指示的功能。
④報文發送任務。該任務存儲未能發送的報文,并在發送緩沖區可用的情況下自動發送報文。
初始化CAN控制器的程序詳見第3節。由于初始化CAN控制器直接和CAN物理層及鏈路層的性能掛鉤,因此只有依據具體應用環境正確地配置CAN控制器,才能使系統穩定地運行。
5.1 中斷服務程序
中斷服務程序用來判斷CAN控制器的中斷類型,并作出相應的響應。具體程序如下:
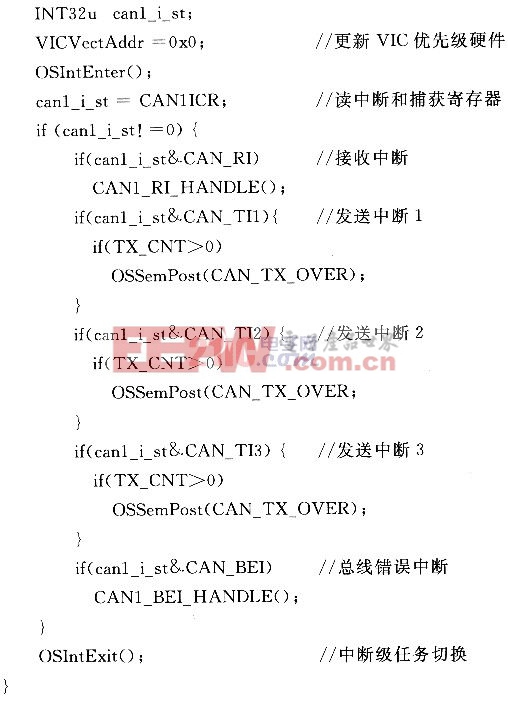
這里只對接收中斷、發送中斷以及總線錯誤中斷進行闡述,其他類型的CAN中斷處理應根據具體系統進行具體設計。
5.1.1 接收中斷
接收中斷處理函數CANl_RI_HANDLE()負責接收報文,并將報文發送到任務的消息隊列中。其代碼如下:
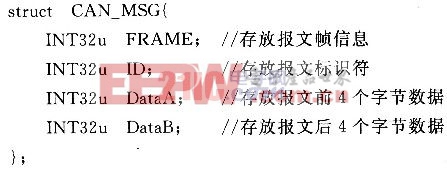
其中,RI_DATA為定義的結構體CAN_MSG變量;CANlRFS、CANlRID、CANlRDA和CANlRDB分別為CAN控制器存儲接收報文幀信息、標識符、數據字節的寄存器。CAN_MSG結構體如下所示:











評論