SoPC+GPS/GSM實現汽車狀態監控系統

引 言:
基于SoPC的汽車安全監控系統采用Altera公司最新的SoPC(可編程片上系統)解決方案——Nios處理器軟核為核心,配合GPS和GSM系統,對汽車的停放和運行狀態進行監控。
基于SoPC的汽車安全監控系統可廣泛應用于汽車的防盜、日常維護和交通事故的處理,為車輛故障提供有效的測試手段。
1 系統硬件組成
設計采用Altera公司的SoPC開發工具。系統的開發包括硬件和軟件兩大部分。使用SoPC Builder生成Nios嵌入式處理器,Nios嵌入式處理器開發工具允許用戶配置一個或多個Nios CPU,從標準庫中添加外圍設備,綜合處理自定義系統,與Quartus II設計軟件一起編譯系統。軟件開發的步驟是:利用SoPC Builder生成的軟件文件,用文本編輯器編寫匯編語言或C/C++源程序,用GNUPro軟件開發工具進行程序設計、連編和調試。GNUPro將源程序連編(包括匯編/編譯和連接)成可執行程序,通過下載電纜對可執行程序進行調試和運行。Quartus II設計軟件提供全面有效的設計環境,將設計、綜合、布局和驗證以及第三方EDA工具接口集成在一個無縫的環境中。利用集成在Quartus II 3.0中的SoPCbuilder可以創建自己的Nios CPU系統。Nios是Altera公司開發的16/32位嵌入式處理器軟核。
校科研基金項目“基于SOPC的汽車安全監控系統”資助。 Altera公司推出了新一代多種系列FPGA,本設計選用低成本的Cyclone系列器件EP1C12,其具有12 060個邏輯單元,52個M4K RAM塊,239 616個RAM位和2個鎖相環,最大用戶I/O引腳249。
系統硬件組成框圖由Nios系統和外部設備兩部分組成,如圖1所示。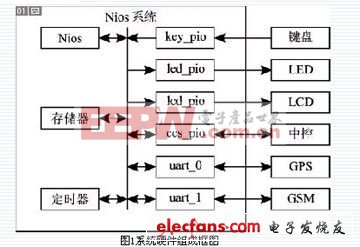
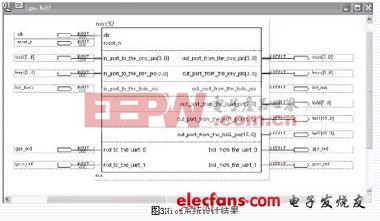
Nios系統包括CPU(Nios)、存儲器(memory)、定時器(timer)、總線和并/串行接口(key_pio、led_pio、lcd_pio、ccs_pio、uart_0和uart_1)等,并/串行接口分別實現與鍵盤、LED和LCD顯示器、汽車中控系統以及GPS和GSM系統等外部設備的連接。Nios系統設計和設計結果分別如圖2和圖3所示。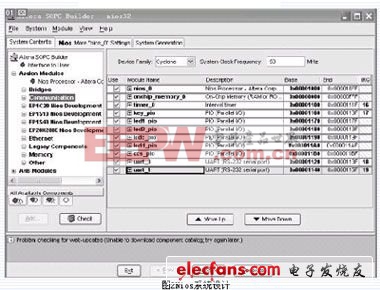
Nios系統同鍵盤、LED和LCD顯示器、汽車中控系統以及GPS系統等外部設備的連接比較簡單,GSM系統的連接較為復雜,如圖4所示。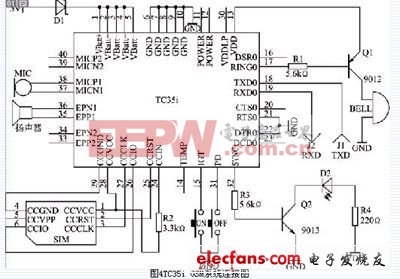
整個系統的工作過程是:來自汽車中控系統和GPS系統的信息可以顯示在LED和LCD顯示器上,也可以通過GSM系統進行無線發送。用戶可以通過鍵盤對系統進行控制,也可以通過GSM系統對汽車中控系統進行遠程無線控制。
2 系統軟件組成
系統軟件主要由主程序、GPS管理子程序和GSM管理子程序等部分組成。
主程序完成系統的初始化,以及鍵盤、LED、LCD顯示器和汽車中控系統的操作管理等。
GPS管理子程序主要負責從GPS系統接收時間和位置信息。
請求GPS系統返回ASCII時間位置信息的二進制命令為:
@@EqmC
其中,m為0時,輸出一次響應信息(查詢),m為1~255時,每1~255 s輸出一次響應信息(連續);
C為校驗和(Eqm按字節“異或”);
為回車(十六進制0d);
為換行(十六進制0a);
命令長度為8字節。
命令的響應信息為:
@@Eq,mm,dd,yy,hh,mm,ss,dd,mm.mmmm,n,ddd,mm.mmmm,w, shhhhh.h,sss.s,hhh.h,m,t,dd.d,nn,rrrr,aa,CCC
日期:mm是月(01~12),dd是日(01~31),yy是年(99~19)。
世界時間(UTC):hh是時(00~23),mm是分(00~59),ss是秒(00~59)。
緯度:dd是度(00~90),mm.mmmm是分(00~59.9999),n是方向(N是北,S是南)。
經度:ddd是度(000~180),mm.mmmm是分(00~59.9999),w是方向(W是西,E是東)。
信息長度是96字節。
對應的管理子程序為:
int eq[8]={@,@,E,q,1,C,0x0d,0x0a};
void gps_txd(int data[], int n) {
volatile int m,sum=0;
for(m=0;m
while(~na_uart_0->np_uartstatus 0x40);
/等待發送準備好
if(m!=n-3) {
sum^=data[m];/計算校驗和
na_uart_0->np_uarttxdata=data[m];/發送數據
}else
na_uart_0->np_uarttxdata=sum; /發送校驗和
}
}
int gps,gps_buf[46];/定義全局變量
void gps_rxd(int context) {/接收中斷服務程序
gps_buf[gps]=na_uart_0->np_uartrxdata; /接收數據
if(gps_buf[gps++]==q) gps=0; /數據定位
if(gps>46) gps=46;/忽略無用數據
}
GSM管理子程序主要負責GSM系統的數據收發管理。
GSM系統的數據收發以短信形式進行,選擇短信格式的AT命令為AT+CMGF,收發短信的AT命令分別為AT+CMGR和AT+CMGS,對應的管理子程序為:
cmgf[20]={A,T,+,C,M,G,F,=,1,0x0d};/短信格式void gsm_txd(int data[], int n) {
volatile int m;
for(m=0;m
while(~na_uart_1->np_uartstatus 0x40);
/等待發送準備好na_uart_1->np_uarttxdata=data[m]; /發送數據
}
}
int gsm=2,gsm_buf[18]={A,T};
void gsm_rxd(int context) {
/接收中斷服務程序
gsm_buf[gsm]=na_uart_1->np_uartrxdata; /接收數據
if(gsm_buf[gsm]==T) gsm=1;
/數據定位
if(++gsm==18) gsm=2;
}
3 設計調試方法和設計結果
實際試用結果表明:基于SoPC的汽車安全監控系統運行正常,定位準確,數據傳輸可靠,操作管理方便。如果再配備上GIS(地理信息系統),整個系統將如虎添翼。











評論