基于線陣CCD的交通信息采集和檢測系統設計與實現

2 系統功能
基于線陣CCD的交通信息采集和檢測系統具有以下功能:
(1)視頻觸發功能
當車輛進入第一個線陣CCD相機視場范圍時,系統能夠自動檢測到車輛存在,并產生抓拍信號,抓拍車輛牌照的近景圖像,并啟動牌照識別模塊,獲得該車輛的車牌號。當車輛離開第一個線陣CCD相機視場范圍后,系統能夠自動檢測到車輛消失,并產生車輛結束信號,啟動測速模塊,計算該車輛的速度。
(2)瞬時速度檢測功能
本系統通過檢測車輛的斷面,計算車輛的瞬時速度。利用車輛前端通過第一個線陣CCD相機和通過第二個線陣CCD相機的時間差計算該車輛的瞬間速度,因為兩個線陣CCD之間的距離是固定不變的。這個速度即可作為車輛通過該檢測斷面的瞬時速度。
(3)超速實時處罰功能
本系統的實時處罰功能主要利用安裝在收費出口處的牌照識別子系統對通過車輛進行牌照自動識別,當超速車輛通過收費站時,管理子系統根據從測速子系統得到的超速車輛信息和收費出口處的牌照信息進行比對,如果是超速車輛,本系統會自動報警,提醒執法人員對違章車輛進行就地處罰。
(4)車型識別和交通量統計功能
本系統可以由線陣CCD相機的成像結果和車速計算出車長,以確定車型(對于本系統,車長=速度×成像線數/1 000)。此外,可以利用數據庫對交通量進行分時段或分車型統計。
(5)車輛通行記錄功能
本系統可實現對過往車輛的記錄功能,每條記錄包括車輛的牌照號、狀態(例如是否超速)、行車道、通過時間等信息,并可通過通行記錄界面觀看到車輛的遠景和近景圖片,可以為處罰提供有力的證據。
3 主要關鍵技術
3.1 基于圖像紋理的車輛存在檢測算法
線陣CCD每次成像為道路段面的一條線,為了保證檢測結果的實時性,要求對采集數據逐線處理,而常規的視頻檢測算法都是基于一幀面陣圖像的,因此,需要設計出適用于線陣CCD圖像的車輛檢測算法。
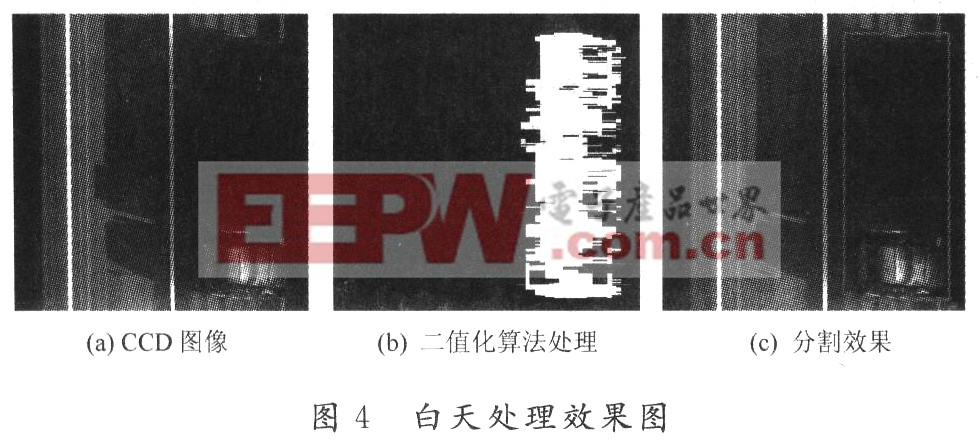
本系統采用基于圖像紋理的車輛存在檢測算法,包括基于圖像紋理特征的二值化算法和車輛分割算法兩部分。其基本思想如下:
利用小波變換提取路面的紋理特征,然后對采集的每線數據進行二值化,并在此基礎上,逐線進行車輛分割。圖4(a)所示為白天采集的線陣CCD圖像,由于太陽照射的影響,圖像中存在車輛陰影。采用基于圖像紋理特征的二值化算法處理效果如圖4(b)所示,去除了陰影的干擾,圖4(c)為車輛分割效果,可見本算法能夠有效抑制陰影對車輛分割的影響,具有較好的分割效果。






評論