基于線陣CCD的交通信息采集和檢測系統設計與實現

該系統由硬件和軟件兩部分組成,主要的設備包括:線陣CCD相機、線激光源、閃光燈、專用高分辨率攝像機和64位工控機。軟件主要實現相機及輔助光源控制,圖像數據采集,視頻錄制及回放,圖像分割,車輛匹配,車牌識別,車輛數據庫管理,車輛數據分析,系統設置和系統容錯等功能。
1.2 系統總體框架
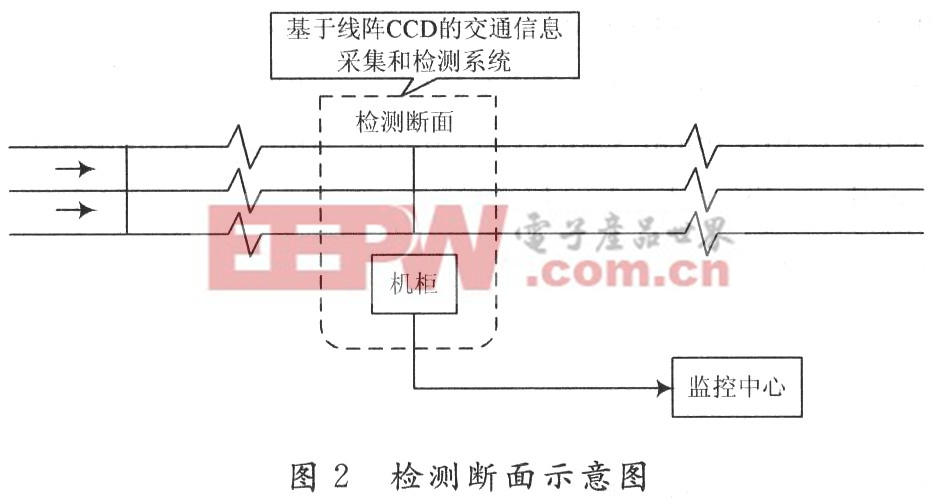
基于線陣CCD的交通信息采集和檢測系統的主要設備包括:線陣CCD相機、線激光源、閃光燈、專用高分辨率攝像機和64位工控機,以上設備均安裝在路段上。為了達到交通信息實時采集的要求,用戶可以根據需要,設立多個檢測斷面。圖2為本系統的一個檢測斷面。
圖3為一個雙向四車道高速公路實驗現場某一檢測斷面的側視圖。
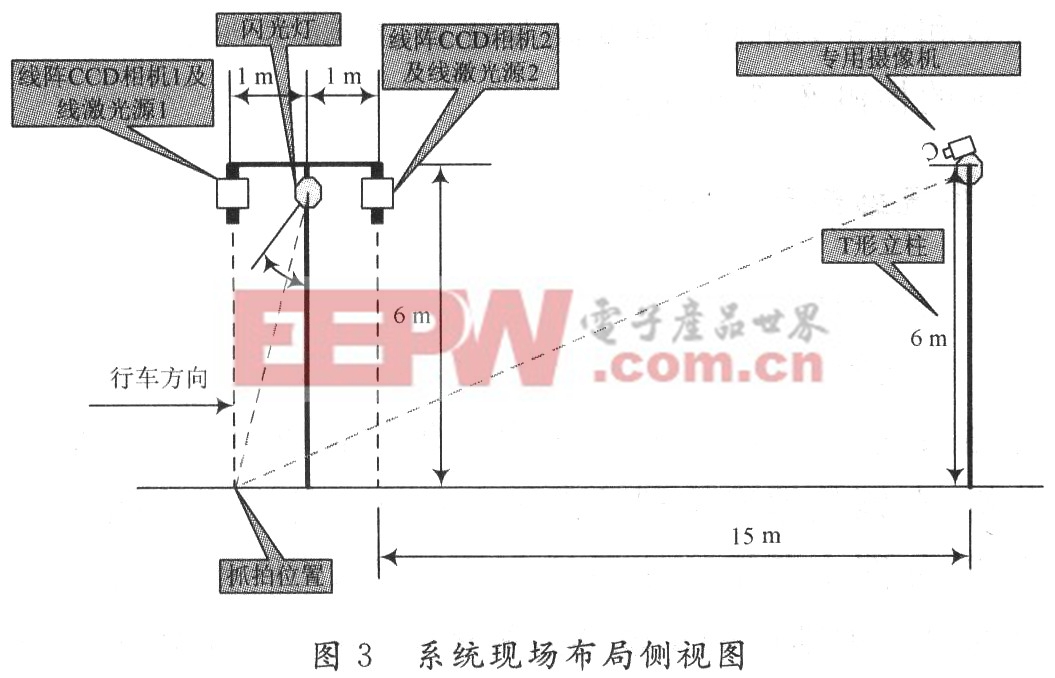
在該檢測斷面上主要完成車輛線陣圖像采集,以及車輛近景和遠景圖像的抓拍,然后在道路旁的機柜中進行圖像處理和分析,獲取車牌號碼、車輛存在、車輛速度、車輛平面輪廓、車輛類型、交通占有率和流量等各種交通參數,并由此得到各種其他交通描述參數,進一步實現對道路交通狀況的監測評判和對交通事件的實時檢測。系統通過TCP/IP協議向監控中心實時傳遞其所需要的數據信息。
1.3 工作原理
線陣CCD攝像機1和攝像機2一直處于工作狀態,監視路面狀況。機柜里的目標識別程序根據攝像機1所采集到的線陣圖像,判斷是否有車輛經過,當有車輛進入線陣CCD攝像機1的視野范圍時,啟動計時程序和全景攝像機及目標所在車道的攝像機(如果車輛在兩個車道的中間,則啟動輔助攝像機),并對車輛進行自動抓拍,得到一幅近景圖片和遠景圖片;同時,調用牌照識別程序進行牌照識別并將識別結果保存。同理,當車輛進入線陣CCD攝像機2的視野范圍時,目標識別程序檢測到車輛經過攝像機2,直到車尾離開線陣CCD攝像機2的視野范圍時,停止計時。根據線陣CCD攝像機1和2抓拍的圖片以及車輛通過檢測斷面的時間,計算車輛瞬時速度,提取車輛輪廓、類型、交通占有率等交通參數,并將結果存入數據庫。對于超速車輛,機柜將自動把其車牌號碼、車速等相關信息傳到監控中心,便于中心人員進行相應的處理。監控中心也可向路邊機柜發出查詢請求,路邊機柜將把相應的查詢結果傳送到監控中心。路邊機柜中的數據庫和圖像庫將按照用戶設定的時間自動清空,防止磁盤空間不足導致現有的數據無法保存。






評論