基于視覺圖像的微小零件邊緣檢測算法研究

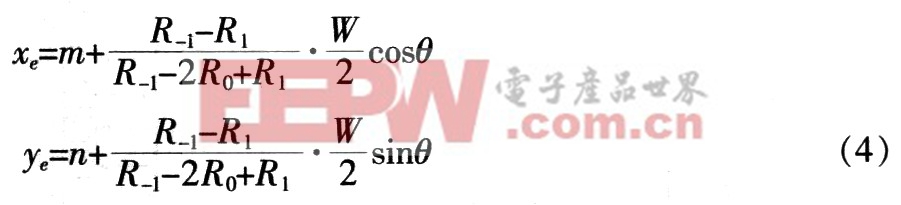
式中:W為相鄰像素點到邊緣點距離,θ為梯度方向與x軸正向夾角。
由式(4)可得出,亞像素細分定位邊緣的前提條件為:R0>R-1且R0>R1。
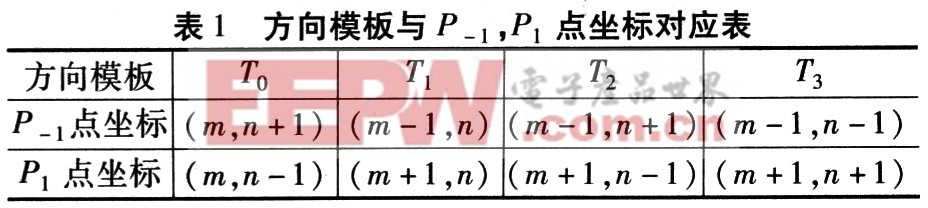
采用擴展的Sobel細化算子搜索單像素邊緣,在搜索過程中,剔除邊緣點梯度方向的非極大值,從而保證亞像像素細分定位的前提條件成立。方向模板與P-1,P1點坐標對應表如表1所示。
4 實驗與結果分析
為了驗證該算法,提取在線實時采集的微小零件圖像進行實驗。
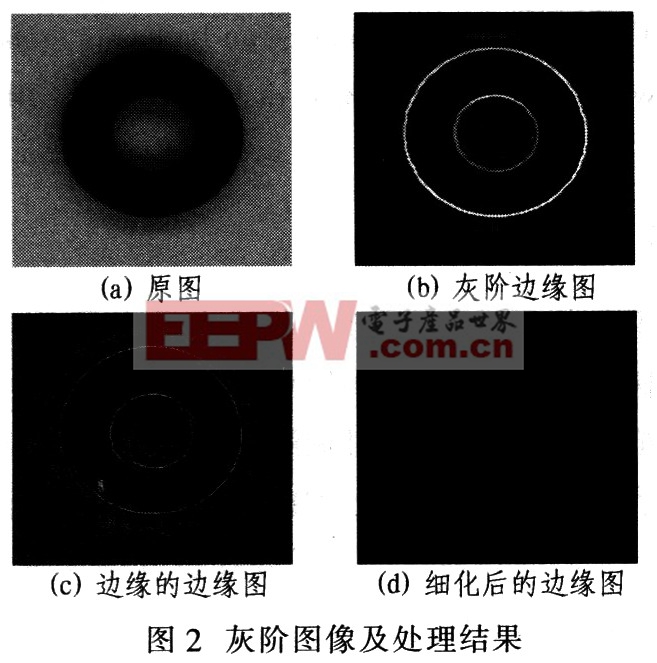
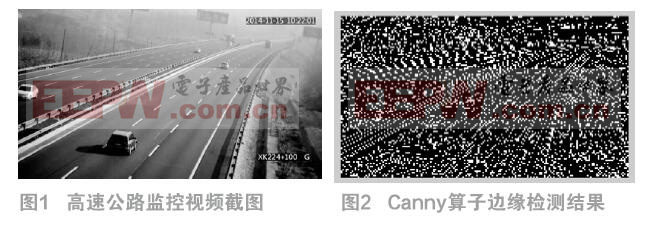
(1)可擴展的Sobel細化算子的驗證 引入灰階Sobel算子后,得到的邊緣圖仍是灰階圖像,此時采用Sobel算子處理,得到邊緣的邊緣圖。在新的邊緣圖上,原邊緣的兩側得到新的邊緣,而中間部分卻變成背景,且其寬度小于原邊緣。利用該特點細化原邊緣,即將原邊緣減去新邊緣圖,再將結果中與負的部分對應的邊緣變為零,最后得到接近單像素寬的邊緣圖,從而達到細化邊緣的效果,如圖2所示。
(2)亞像素細分算法定位 經過擴展方向模板的Sobel細化算子后,提取接近單像素的邊緣,在其梯度方向上用亞像素細分算法對圖像邊緣進一步定位。
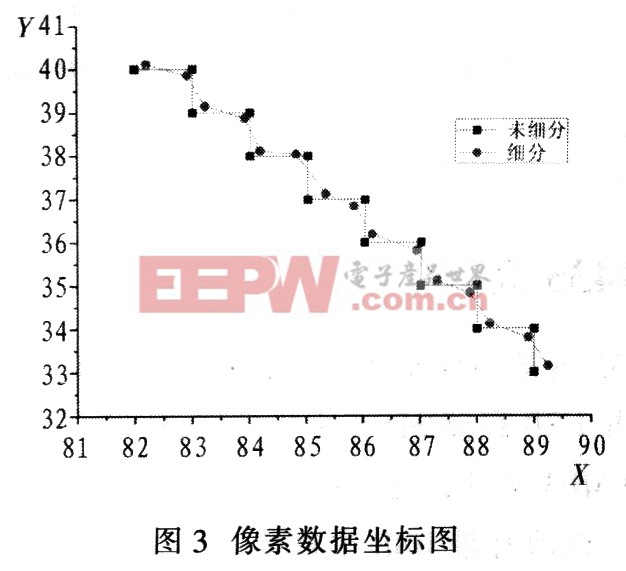
圖3是在原邊緣基礎上取一段圓弧,對其細分前后的坐標圖,可以看出,經過亞像素細分算法定位后得到的像素邊緣比較光滑。相對于未細分,其精確度得到提高。
(3)計算標準偏差 以單個點的像素坐標值為標準坐標值,將定位后的單點與對應點的坐標差作為算法偏差,計算得到的標準偏差約0.20 pixel。
5 結論
采用的邊緣檢測算法是通過擴展的4個方向的Sobel算子引入衰減因子而得到無失真的灰階邊緣圖,再采用Sobel算子細化,可使較陡邊緣部分光滑連續,且接近單點寬的邊緣;采用二次多項式插值法在梯度方向插值后得到光滑邊緣,定位精度達到0.20 pixel,適于對精度要求較高的視覺系統。


評論