通過創新圖形化開發平臺快速構建移動機器人的原型

3、決策規劃
路線規劃組件使用的是A *搜索算法,以確定Odin應該經過哪些路段從而遍歷所有的檢查站。駕駛行為組件采用了基于行為的LabVIEW狀態機架構,負責遵守交通規則并引導車輛沿計劃路線行駛。運動規劃組件進行迭代軌跡搜索,避讓障礙并引導車輛沿理想軌跡行駛。最后決策判定系統將運動序列傳遞給車輛控制接口并轉換為驅動器控制信號。
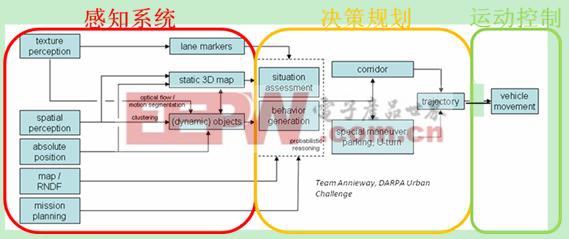
圖4 Odin系統組成框架
4、通訊架構
整個通訊框架都基于LabVIEW進行開發,實現了汽車工程師協會(SAE) AS - 4無人系統聯合架構(JAUS)協議,每個軟件模塊都是JAUS組件,所有模塊之間的交互都是通過LabVIEW框架來完成的,每個軟件模塊可作為獨立組件異步運行在Windows或Linux操作系統之下。完成整個通訊構架中需要使用多種編程語言,由于LabVIEW的開放性,可以很方便在其他編程環境中調用LabVIEW軟件模塊或與之接口。
5、使用LabVIEW的優勢
LabVIEW平臺提供了一個直觀,易于使用的調試環境,可以讓開發團隊實時地監測源代碼的運行,從而方便的實現硬件在環調試。通過LabVIEW開發環境,團隊快速可以構建系統原型并加快設計的往復周期。此外, LabVIEW與硬件的無縫連接,對于執行某些關鍵操作如傳感器處理和車輛控制是至關重要的。由于城市挑戰賽問題復雜且開發時間很短,這些因素對于開發團隊的成功發揮了關鍵作用。
總結
圖形化系統設計對于繼續加快機器人設計中的創新而言是必不可少的。復雜的傳統工具可能會阻礙機器人技術的進步。LabVIEW提供了一個綜合的、可擴展的平臺,能夠橫跨設計、原型開發和部署階段,因此工程師們能夠不用為微小的實現細節所困擾,可以更加關注機器人本身。他們可以使用同樣強大的平臺,對微控制器直至FPGA等各種控制器進行編程;還可以同幾乎任何傳感器和執行器發送與接收信號;設計并仿真動態控制系統;以及實現進行遠程監視或控制機器人的接口。LabVIEW圖形化系統設計平臺通過為所有機器人設計者提供一個統一的平臺,鼓勵設計更為精妙的機器人。






評論