基于虛擬儀器的機(jī)載陀螺儀測(cè)試系統(tǒng)研究

1.4 計(jì)算機(jī)控制系統(tǒng)
計(jì)算機(jī)控制系統(tǒng)對(duì)采集的數(shù)據(jù)進(jìn)行處理,并進(jìn)行圖像顯示,向操作人員提示及報(bào)警。對(duì)試驗(yàn)結(jié)果進(jìn)行分析記錄,以測(cè)試報(bào)表形式輸出。軟件采用全漢化處理,選用菜單對(duì)話形式,將每一步操作方法都顯示在顯示屏上。操作人員可以按照提示完成操作。本文引用地址:http://www.104case.com/article/195320.htm
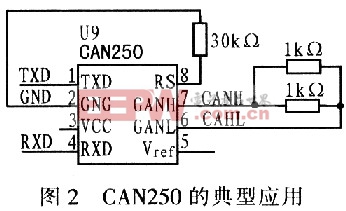
通信模塊實(shí)現(xiàn)板卡與計(jì)算機(jī)之間的通信,計(jì)算機(jī)使用RS232總線,而智能板卡使用CAN總線,轉(zhuǎn)換模塊完成數(shù)據(jù)的采集功能,如圖2所示。
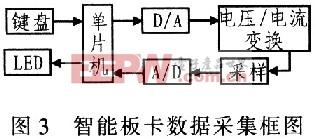
C8051F005單片機(jī)實(shí)現(xiàn)對(duì)D/A轉(zhuǎn)換器DAC714和A/D轉(zhuǎn)換器TLC2543的控制,產(chǎn)生直流電壓信號(hào),經(jīng)輸出采樣電路的電壓/電流轉(zhuǎn)換、放大,輸出穩(wěn)定的直流電流。使用D/A輸出、A/D采樣,與主控單片機(jī)形成閉環(huán)控制系統(tǒng)。可用鍵盤進(jìn)行電流數(shù)值設(shè)定,用LED(發(fā)光二極管)進(jìn)行顯示,智能板卡數(shù)據(jù)采集框圖如圖3所示。
1.5 信號(hào)調(diào)理箱
信號(hào)調(diào)理箱實(shí)現(xiàn)信號(hào)的調(diào)理、采集和輸出。通過分析不同型號(hào)陀螺的工作原理,其輸出信號(hào)有同步器、模擬量和開關(guān)量等信號(hào)。根據(jù)信號(hào)性質(zhì),信號(hào)調(diào)理箱包含S/D、A/D和繼電器等集成電路,能夠?qū)⑼狡餍盘?hào)、模擬量信號(hào)轉(zhuǎn)換為數(shù)字信號(hào),達(dá)到與計(jì)算機(jī)通信的目的。
采用CJ24Y4L和CJ24W型航空智能板卡采集陀螺儀的輸出模擬量。CJ24W航空智能板卡可以滿足模擬信號(hào)的輸出,輸出電壓為0~23 V。模擬量采集為24路單端輸入和8路差分輸入,分辨率為24位,可以采集0~300 V的電壓,0~2 A的電流。采集數(shù)據(jù)精度高、速度快、穩(wěn)定性好。由于陀螺儀的信號(hào)輸出數(shù)量多,不可能將所有信號(hào)同時(shí)輸入到信號(hào)調(diào)理箱,必須經(jīng)過繼電器矩陣進(jìn)行切換,繼電器切換必須具有足夠快的響應(yīng)時(shí)間,能通斷較大的信號(hào),因此選用型號(hào)為JDQ航空智能板卡,實(shí)現(xiàn)信號(hào)的連接、斷開和轉(zhuǎn)換。該航空智能板卡工作電壓為DC+27 V,信號(hào)的采集和模擬均符合航電設(shè)備的輸入輸出要求。
2 系統(tǒng)軟件設(shè)計(jì)
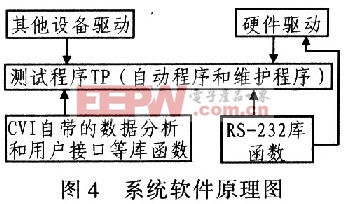
系統(tǒng)軟件采用美國(guó)NI公司的虛擬儀器軟件LabWindows/CVI進(jìn)行設(shè)計(jì)開發(fā),CVI是在C語(yǔ)言(ANSIC)的基礎(chǔ)上增加了儀器控制和工具函數(shù)庫(kù)的虛擬儀器開發(fā)軟件,具有友好的圖形用戶界面,因此選用CVI可以加快測(cè)試程序開發(fā)。系統(tǒng)軟件原理圖如圖4所示。
為了方便和規(guī)范測(cè)試系統(tǒng)程序的編寫,將各個(gè)硬件模塊的驅(qū)動(dòng)編譯生成動(dòng)態(tài)庫(kù),由測(cè)試系統(tǒng)程序根據(jù)需要進(jìn)行調(diào)用。系統(tǒng)程序開發(fā)過程中,硬件驅(qū)動(dòng)和虛擬儀器界面的開發(fā)是重點(diǎn)。
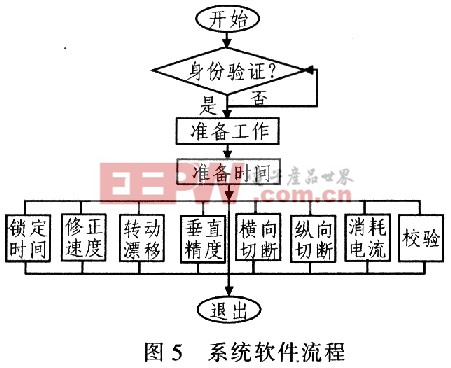
硬件驅(qū)動(dòng)設(shè)計(jì)是對(duì)智能板卡進(jìn)行程控,方便測(cè)試系統(tǒng)程序的編寫和集成。航空智能板卡驅(qū)動(dòng)程序是上位機(jī)與下位機(jī)程序通信的紐帶,通過調(diào)用驅(qū)動(dòng)函數(shù)實(shí)現(xiàn)計(jì)算機(jī)對(duì)硬件的控制。虛擬儀器界面提供人機(jī)接口,操作員根據(jù)需要施加信號(hào),實(shí)時(shí)監(jiān)測(cè)信號(hào)。CVI提供了開發(fā)虛擬儀器界面的用戶接口資源文件(*.uir)、各種控制和顯示控件,用于模擬實(shí)際儀表界面。分析完成航空電源智能采集板上位機(jī)采集功能所需的各種控件。根據(jù)CVI軟件編程,完成控件的編制,除了一些基本的控制顯示控件外,還有一個(gè)示波器顯示控件,它用于顯示采集數(shù)據(jù)的波形。機(jī)載陀螺進(jìn)行檢測(cè)系統(tǒng)軟件流程如圖5所示。
控制函數(shù)的編寫過程中,由于在板卡功能設(shè)計(jì)中有交流和直流之分,因此在波形顯示界面設(shè)計(jì)時(shí),也將其分為交流和直流2個(gè)波形顯示界面。而在運(yùn)行程序過程中,采集交流或直流,都需將另外一個(gè)隱藏起來,這就用到函數(shù)SetCtrlAttribute(panelHandle,PANEL_STRIPCHAR-T,ATTR_VISIBLE,1)和函數(shù)SetCtrlAttribute(panelHandle,PANEL_GRAPH,ATTR_VISIBLE,0)。在控制函數(shù)中,繪制波形的函數(shù)PlotStrip Chart(panelHandle,PANEL_STRIPCHART,data,1,0,0,VAL_DOUBLE); 采用函數(shù)SetCtrlAttribute(panelHandle,PANEL_TIMER,ATTR_ ENABLED,1)打開時(shí)鐘,進(jìn)行數(shù)據(jù)采集。



評(píng)論